
- alimentation sur secteur ;
- un PC comme coeur informatique ;
- un système d’exploitation générique.
Systèmes embarqués |
#include <avr/io.h>
#include <util/delay.h>
int main(void){
DDRB |= 0x01;
while(1){
PORTB ^= 0x01;
_delay_ms(500);
}
}


MULS r10,r11
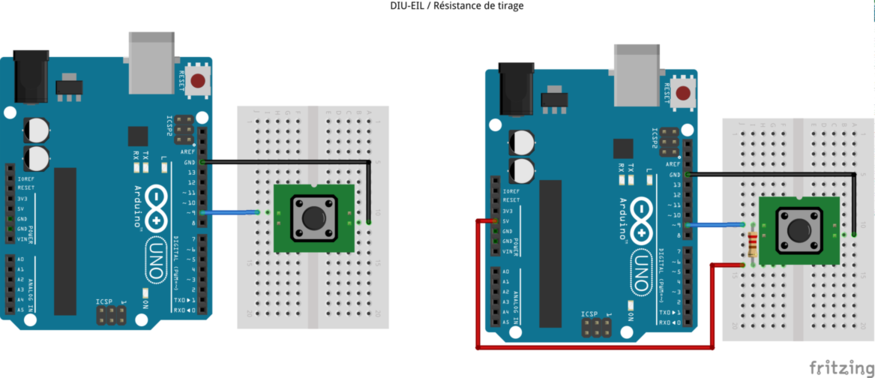
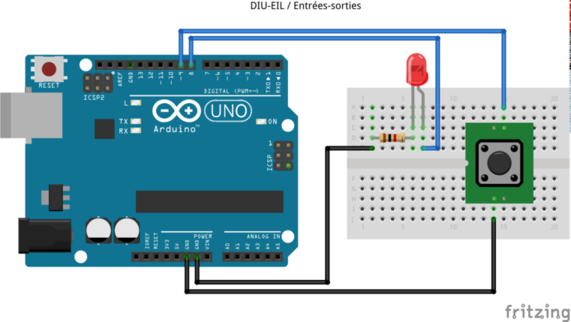
const int LED=8;
const int BOUTON=9;
void setup(){
pinMode(LED,OUTPUT); // Sortie pour la LED
pinMode(BOUTON,INPUT_PULLUP); // Entrée pour le bouton (résistance de tirage)
}
void loop(){
int etat=digitalRead(BOUTON); // Lecture de l'état du bouton
if(etat==HIGH) digitalWrite(LED,LOW); // LED éteinte
else digitalWrite(LED,HIGH); // LED allumée
}
#include <avr/io.h>
#define LED 8
#define BOUTON 9
int main(void){
DDRB |= 0x01; // Sortie pour la LED
DDRB &= ~0x02; // Entrée pour le bouton
PORTB |= 0x02; // Configuration de la résistance de tirage
while(1){
if(PINB & 0x02) PORTB &= ~0x01; // LED éteinte
else PORTB |= 0x01; // LED allumée
}
}

const int LED_G=8;
const int LED_D=9;
const int LIGNE_G=A0;
const int LIGNE_M=A1;
const int LIGNE_D=A2;
const int LIMITE=128;
void setup(){
pinMode(LED_G,OUTPUT);
pinMode(LED_D,OUTPUT);
}
void loop(){
int lg=analogRead(LIGNE_G); // Valeurs des détecteurs de ligne
int lm=analogRead(LIGNE_M);
int ld=analogRead(LIGNE_D);
if(lg<LIMITE) digitalWrite(LED_D,HIGH); // Ligne perdue à gauche, tourner à droite
if(ld<LIMITE) digitalWrite(LED_G,HIGH); // Ligne perdue à droite, tourner à gauche
if(lm<LIMITE){ // Sur la ligne continuer tout droit
digitalWrite(LED_D,LOW);
digitalWrite(LED_G,LOW);
}
}
#include <avr/io.h>
void ad_init(unsigned char channel){ // Sélectionne un canal
ADCSRA |= (1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); // Division de fréquence 128 => 125KHz
ADCSRA &= ~(1<<ADFR); // Mode conversion unique
ADMUX |= (1<<REFS0)|(1<<ADLAR); // Référence de mesure AVCC
ADMUX=(ADMUX&0xf0)|channel; // Selection du canal
ADCSRA|=(1<<ADEN); // Convertisseur activé
}
unsigned int ad_capture(void){ // Acquisition de tension
ADCSRA|=(1<<ADSC); // Début de conversion
while(bit_is_set(ADCSRA, ADSC)); // Attente de la fin de conversion
return ADCH; // Résultat sur 8 bits car ADLAR=1
}
int main(void){
DDRB |= 0x03;
int lg,lm,ld;
while(1){
ad_init(0); lg=ad_capture();
ad_init(1); lm=ad_capture();
ad_init(2); ld=ad_capture();
if(lg<LIMITE) PORTB |= 0x02; // Ligne perdue à gauche, tourner à droite
if(ld<LIMITE) PORTB |= 0x01; // Ligne perdue à droite, tourner à gauche
if(lm<LIMITE) PORTB &= ~0x03; // Sur la ligne continuer tout droit
}
}
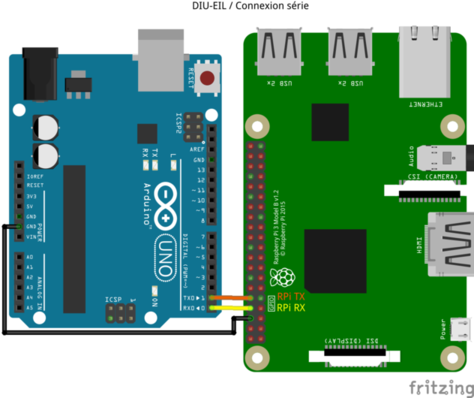
void setup(){
Serial.begin(9600); // configuration de la vitesse
}
void loop(){
while(1){ // il y a de l'écho
if(Serial.available()){ // un octet disponible ?
int c=Serial.read(); // lecture de l'octet reçu
Serial.write(c); // envoi d'un octet
}
}
#include <avr/io.h>
void serie_init(long int vitesse){
UBRR0=F_CPU/(((unsigned long int)speed)<<4)-1; // configure la vitesse
UCSR0B=(1<<TXEN0 | 1<<RXEN0); // autorise l'envoi et la réception
UCSR0C=(1<<UCSZ01 | 1<<UCSZ00); // 8 bits et 1 bit de stop
UCSR0A &= ~(1 << U2X0); // double vitesse désactivée
}
void serie_envoyer(char c){
loop_until_bit_is_set(UCSR0A,UDRE0);
UDR0=c;
}
char serie_recevoir(void){
loop_until_bit_is_set(UCSR0A, RXC0);
return UDR0;
}
int main(void){
serie_init(9600);
while(1){
unsigned char c=serie_recevoir();
serie_envoyer(c);
}
return 0;
}
#include <SPI.h>
void setup(void){
SPI.begin(); // Initialisation SPI
SPI.setClockDivider(SPI_CLOCK_DIV8); // Horloge F_CPU/64
digitalWrite(SS,HIGH); // Désactive le périphérique
}
void loop(void){
digitalWrite(SS,LOW);
for(i=0;i<64;i++) SPI.transfer(0xe0);
digitalWrite(SS,HIGH);
}
#include <avr/io.h>
#define SPI_DDR DDRB
#define SPI_PORT PORTB
#define SPI_SS 2
#define SPI_MOSI 3
#define SPI_MISO 4
#define SPI_SCK 5
void spi_init(void){ // Initialisation du bus SPI
SPI_DDR |= (1<<SPI_MOSI)|(1<<SPI_SCK)|(1<<SPI_SS); // Définition des sorties
SPI_DDR &= ~(1<<SPI_MISO); // Définition de l'entrée
SPI_PORT |= (1<<SPI_SS); // Désactivation du périphérique
SPCR = (1<<SPE)|(1<<MSTR)|(1<<SPR1); // Activation SPI (SPE) en état maître (MSTR)
// horloge F_CPU/64 (SPR1=1,SPR0=0)
}
void spi_activer(void){ // Activer le périphérique
SPI_PORT &= ~(1<<SPI_SS); // Ligne SS à l'état bas
}
void spi_desactiver(void){ // Désactiver le périphérique
SPI_PORT |= (1<<SPI_SS); // Ligne SS à l'état haut
}
uint8_t spi_echange(uint8_t envoi){ // Communication sur le bus SPI
SPDR = output; // Octet a envoyer
while(!(SPSR & (1<<SPIF))); // Attente fin envoi (drapeau SPIF du statut)
return SPDR; // Octet reçu
}
int main(void){
spi_init();
int i;
spi_activer();
for(i=0;i<64;i++) spi_echange(0xe0); // Que de rouge
spi_desactiver();
}
#define MATRICE_REG_LUMINE 0xE0
#define MATRICE_SYSTEME 0x20
#define MATRICE_AFFICHAGE 0x80
#define MATRICE_ADR_I2C 0x70
void luminosite(uint8_t adr_i2c,uint8_t lum){
if(lum>15) lum=15;
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_REG_LUMINE|lum);
Wire.endTransmission();
}
void matrice_init(uint8_t adr_i2c){
Wire.begin();
Wire.setClock(400000UL);
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_SYSTEME|1); // Démarre l'horloge
Wire.endTransmission();
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_AFFICHAGE|1); // Alimente les LED
}
void matrice_afficher(uint8_t adr_i2c,uint8_t image[8]){
Wire.beginTransmission(i2c_addr);
Wire.write((uint8_t)0x00); // Adresse de départ
for(uint8_t i=0;i<8;i++){
Wire.write(image[i]);
Wire.write(0);
}
Wire.endTransmission();
}
#include <avr/io.h>
#define ERROR 0
#define SUCCESS 1
#define IIC_START 0x08
#define IIC_RESTART 0x10
#define IIC_WADDR_ACK 0x18
#define IIC_WDATA_ACK 0x28
#define IIC_RADDR_ACK 0x40
#define IIC_RDATA_ACK 0x50
#define IIC_RDATA_NACK 0x58
#define SCL_CLOCK 400000L // En Hertz
void i2c_init(void){
TWSR=0; // Pas de multiplicateur d'horloge
TWBR=((F_CPU/SCL_CLOCK)-16)/2; // Fréquence de l'horloge i2c
TWCR=(1<<TWEN); // Activation de l'i2c matériel
}
static void i2c_start(void){ // Envoi d'un start
TWCR=(1<<TWINT)|(1<<TWSTA)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0); // Attente de fin d'envoi
}
static void i2c_stop(void){ // Envoi d'un stop
TWCR=(1<<TWINT)|(1<<TWSTO)|(1<<TWEN);
}
static uint8_t i2c_statut(void){ // Etat de la dernière transmission
return (TWSR & 0xF8);
}
void i2c_ecrire(uint8_t octet){ // Envoi d'un octet sur le bus i2c
TWDR=octet; // Ecriture de l'octet à envoyer
TWCR=(1<<TWINT)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0); // Attente de fin d'envoi
}
uint8_t i2c_lire_ack(void){ // Lecture d'un octet sur i2c avec accusé positif
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while((TWCR & (1<<TWINT))==0);
return TWDR;
}
uint8_t i2c_lire_nack(void){ // Lecture d'un octet sur i2c avec accusé négatif
TWCR=(1<<TWINT)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0);
return TWDR;
}
uint8_t i2c_ecrire_registre(uint8_t adr_i2c,uint8_t reg_val,unsigned char stop){
// Modification de la valeur d'un registre
int statut;
i2c_start();
statut=i2c_statut(); if(status!=IIC_START && status!=IIC_RESTART) return ERROR;
i2c_ecrire(adr_i2c<<1);
statut=i2c_statut(); if(status!=IIC_WADDR_ACK) return ERROR;
i2c_ecrire(reg_val);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
if(stop) i2c_stop();
return SUCCESS;
}
uint8_t i2c_ecrire_donnee(uint8_t adr_i2c,uint8_t adresse,uint8_t donnee){
// Ecriture dans la mémoire de l'esclave
int statut;
i2c_start();
statut=i2c_statut(); if(status!=IIC_START && status!=IIC_RESTART) return ERROR;
i2c_ecrire(adr_i2c<<1);
statut=i2c_statut(); if(status!=IIC_WADDR_ACK) return ERROR;
i2c_ecrire(reg_val);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
i2c_ecrire(donnee);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
TWI_stop();
return SUCCESS;
}
#define MATRICE_REG_LUMINE 0xE0
#define MATRICE_SYSTEME 0x20
#define MATRICE_AFFICHAGE 0x80
#define MATRICE_ADR_I2C 0x70
int matrice_afficher(uint8_t image[8]){
int dim=0x01; // Ecriture de quelques registres de la matrice
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_SYSTEME|1,1);
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_REG_LUMINE|dim,1);
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_AFFICHAGE|1,1);
int i; // Envoi de chaque ligne
for(i=0;i<8;i++) i2c_ecrire_donnee(MATRICE_ADR_I2C,2*i,image[i]);
return 0;
}
const byte LED=8;
const byte INT=3;
int etat=LOW;
void clignote(){ // Procédure d'interruption
etat=(etat==LOW)?HIGH:LOW;
digitalWrite(LED,etat);
}
void setup(){
pinMode(LED,OUTPUT); // Sortie pour la LED
pinMode(INT,INPUT); // Entrée pour le détecteur infrarouge
attachInterrupt(digitalPinToInterrupt(INT),clignote,CHANGE);
}
void loop(){} // Rien dans la boucle principale
#include <avr/io.h>
#include <avr/interrupt.h>
#define INT_BAS 0
#define INT_CHANGE 1
#define INT_DESCENTE 2
#define INT_MONTEE 3
void interruption_init // Initialisation d'interruption
(uint8_t num,uint8_t mode){
uint8_t isc0=0,isc1=0;
switch(mode){
case INT_BAS: // Interruption sur niveau bas
isc0=0; isc1=0; break;
case INT_CHANGE: // Interruption sur changement d'état
isc0=1; isc1=0; break;
case INT_DESCENTE: // Interruption sur front descendant
isc0=0; isc1=1; break;
case INT_MONTEE: // Interruption sur front montant
isc0=1; isc1=1; break;
}
if(num==0){ // Configuration pour INT0
EICRA |= (isc1<<ISC01)|(isc0<<ISC00);
EIMSK |= (1<<INT0);
}
if(num==1){ // Configuration pour INT1
EICRA |= (isc1<<ISC11)|(isc0<<ISC10);
EIMSK |= (1<<INT1);
}
}
ISR(INT1_vect){ // Procédure d'interruption
PORTB ^= 0x01; }
int main(void){
DDRB |= 0x01;
DDRD &= ~0x08;
interruption_init(1,INT_CHANGE);
sei(); // Autorisation des interruptions
while(1);
return 0;
}
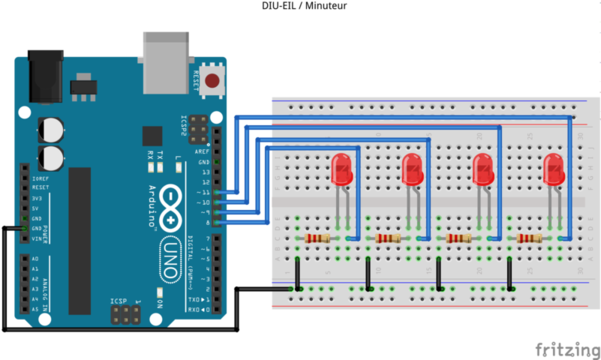
#include <avr/io.h>
#include <avr/interrupt.h>
#define CTC1 WGM12 // Meilleur nom pour le bit
#define PERIODE 1000
void init_minuteur(int diviseur,long periode){
TCCR1A=0; // Le mode choisi n'utilise pas ce registre
TCCR1B=(1<<CTC1); // Réinitialisation du minuteur sur expiration
switch(diviseur){
case 8: TCCR1B |= (1<<CS11); break;
case 64: TCCR1B |= (1<<CS11 | 11<<CS10); break;
case 256: TCCR1B |= (1<<CS12); break;
case 1024: TCCR1B |= (1<<CS12 | 1<<CS10); break;
}
// Un cycle prend 1/F_CPU secondes.
// Un pas de compteur prend diviseur/F_CPU secondes.
// Pour une periode en millisecondes, il faut (periode/1000)/(diviseur/F_CPU) pas
// soit (periode*F_CPU)/(1000*diviseur)
OCR1A=F_CPU/1000*periode/diviseur; // Calcul du pas
TCNT1=0; // Compteur initialisé
TIMSK1=(1<<OCIE1A); // Comparaison du compteur avec OCR1A
}
ISR(TIMER1_COMPA_vect){ // Procédure d'interruption
int led=(PORTB&0x0f);
led >>= 1; if(led==0) led=0x08;
PORTB &= 0xf0; PORTB |= led;
}
int main(void){
DDRB |= 0x0f; // Chenillard sur 4 LED
PORTB &= ~0x0f; // LED éteintes
init_minuteur(256,PERIODE);
sei();
while(1);
}
# apt install gcc-avr avr-libc avrdude
$ avr-gcc -mmcu=atmega328p -DF_CPU=16000000UL -c -Wall -I. -Os programme.c -o programme.o $ avr-gcc -mmcu=atmega328p -g -lm -Wl,--gc-sections -o interrupts.elf interrupts.o
$ avr-objcopy -j .text -j .data -O ihex programme.elf programme.hex $ stty -F /dev/ttyACM0 hupcl $ avrdude -F -v -p atmega328p -c stk500v1 -b 115200 -P /dev/ttyACM0 -U flash:w:programme.hex


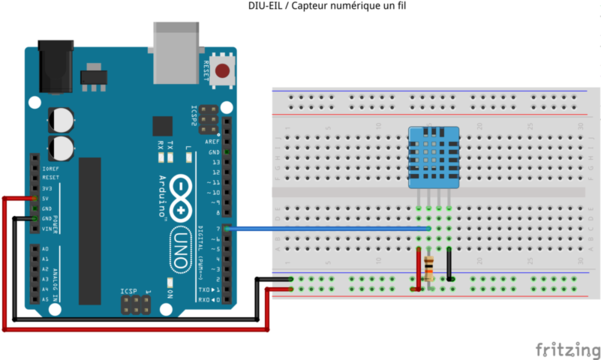
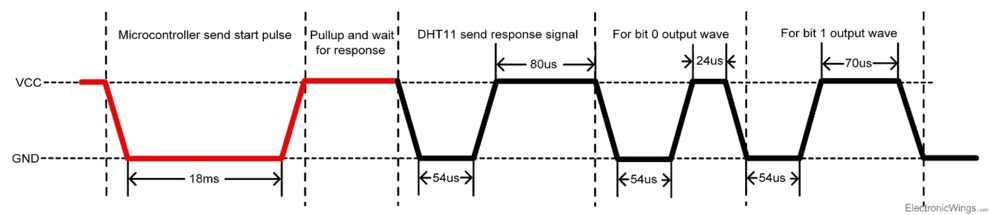
#include <avr/io.h>
#include <util/delay.h>
#define DTH_ERR_TIMEOUT -1
#define DTH_ERR_CHECKSUM -2
typedef struct{
int temperature;
int humidity ;
} dht_values;
#define DTH_DDR DDRD
#define DTH_PORT PORTD
#define DTH_PIN PIND
#define DTH_IO 7
#define DTH_ANSWER_SIZE 40
#define DTH_TIMEOUT (F_CPU/40000) // 2,5 ms
#define DTH_WAIT_LOW_MS 20
#define DTH_WAIT_HIGH_US 40
#define DTH_LOOP_CYCLES 2
#define DTH_HIGH_DELAY_US 40
static void dht_trigger(void){
uint8_t mask=(1<<DTH_IO);
DTH_DDR |= mask;
DTH_PORT &= ~mask;
_delay_ms(DTH_WAIT_LOW_MS);
DTH_PORT |= mask;
_delay_us(DTH_WAIT_HIGH_US);
DTH_DDR &= ~mask;
}
int dht_get(dht_values *values){
uint8_t bits[DTH_ANSWER_SIZE/8];
int i,l;
dht_trigger(); // Trigger answer
uint8_t mask=(1<<DTH_IO); // Check acknowledgment
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)==0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)!=0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(i=0;i<DTH_ANSWER_SIZE;i++){ // Read values
if(i%8==0) bits[i/8]=0;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)==0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)!=0;l--); if(l<0) return DTH_ERR_TIMEOUT;
uint32_t time=l*DTH_LOOP_CYCLES/(F_CPU/1000000L);
bits[i/8] <<= 1;
if(time<DTH_HIGH_DELAY_US) bits[i/8] |= 0x01;
}
uint8_t sum=bits[0]+bits[2]; // Verify checksum
if(sum!=bits[4]) return DTH_ERR_CHECKSUM;
values->humidity=bits[0]; // Convert values
values->temperature=bits[2];
return 0;
}
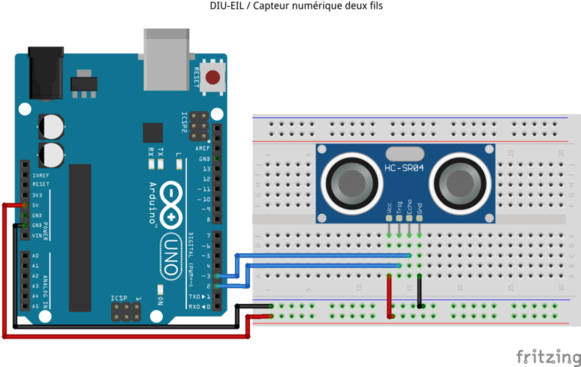
const int LED=13;
const int trigger=2;
const int echo=3;
void setup(){
pinMode(trigger,OUTPUT); // Broche pour activer la mesure (sortie)
pinMode(echo,INPUT); // Broche pour lire la valeur (entrée)
pinMode(LED,OUTPUT);
}
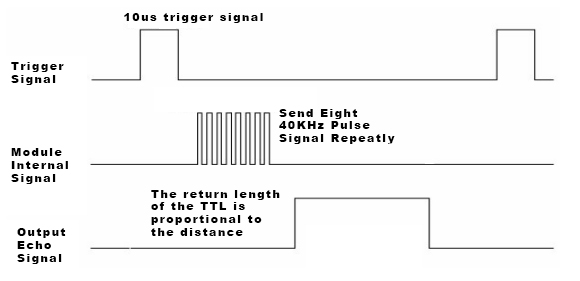
void loop(){
digitalWrite(trigger,LOW); delayMicroseconds(5); // Activer
digitalWrite(trigger,HIGH); delayMicroseconds(10);
digitalWrite(trigger,LOW);
long duree=pulseIn(echo,HIGH); // Mesurer
long distance=(duree/2)/29.1;
if(distance<20) digitalWrite(LED,HIGH); // Réagir
else digitalWrite(LED,LOW);
delay(500);
}
#include <avr/io.h>
#include <util/delay.h>
#define US_DDR DDRD
#define US_PORT PORTD
#define US_PIN PIND
#define US_TRIGGER 2
#define US_ECHO 3
void sonar_init(void){ // Initialiser le sonar
US_DDR |= (1<<US_TRIGGER); // Broche pour activer la mesure (sortie)
US_DDR &= ~(1<<US_ECHO); // Broche pour lire la valeur (entrée)
}
uint32_t sonar_mesure(void){ // Mesurer une distance
uint8_t statut=0;
uint32_t temps=0;
_delay_us(2); US_PORT |= (1<<US_TRIGGER); // Activer
_delay_us(10); US_PORT &= ~(1 << US_TRIGGER);
while(!statut){
while(US_PIN&(1<<US_ECHO)){ // Mesure la durée du signal haut
temps++;
statut=1;
}
}
return disTime * 0.00862; // Conversion en cm
}

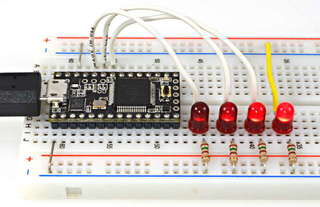
const int LED=8;
void setup(void){
for(int i=0;i<4;i++) pinMode(LED+i,OUTPUT);
for(int i=0;i<4;i++) analogWrite(LED+i,(100-25*i)*255/100);
}
void loop(void){ }
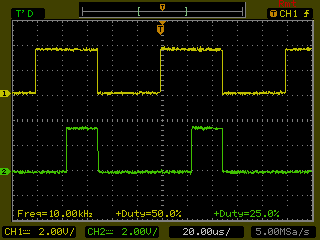
#include <avr/io.h>
#define PWM_DDR DDRD
#define PWM_PORT PORTD
#define PWM1 5
#define PWM2 6
void PWM_init(void){ // Initialisation de la PWM
PWM_DDR |= (1<<PWM1)|(1<<PWM2); // Les ports PWM sont des sorties
TCCR0A |= (1<<COM0A1)|(1<<COM0B1); // Les ports PWM se comportent normalement
TCCR0A |= (1<<WGM01)|(1<<WGM00); // Minuteur mis en mode PWM
TCCR0B |= (1<<CS00); // Pas de pré-diviseur, démarre le compteur
}
int main(void){
PWM_init();
int pwm=0;
while(1){
pwm++; if(pwm>100) pwm=0;
OCR0A=pwm*255/100; // PWM pour le port 5 (ramenée à 255)
OCR0B=(100-pwm)*255/100; // PWM pour le port 6 (ramenée à 255)
_delay_ms(10);
}
return 0;
}
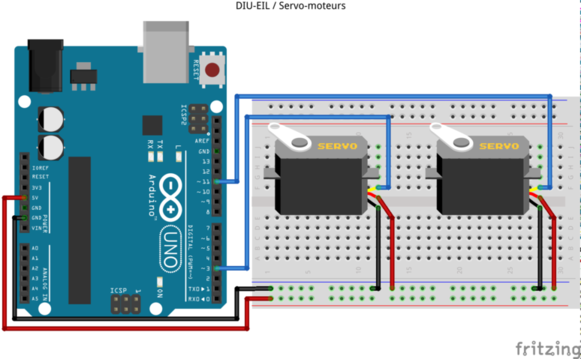
#include <Servo.h>
const int SERVO=3;
Servo myservo; // Objet servo
void setup(){
myservo.attach(SERVO); // Définit la broche du servo-moteur
}
void loop(){
for(pos=0;pos<=180;pos += 1){
myservo.write(pos); // Impose la position (en degrés) au servo
delay(15);
}
for(pos=180;pos>=0;pos -= 1){
myservo.write(pos);
delay(15);
}
}
#include <avr/io.h>
#include <util/delay.h>
void servos_init(void){
DDRD |= 0x08; // La broche 3 du port D est controlée par le minuteur 2
DDRB |= 0x08; // La broche 3 du port B est controlée par le minuteur 2
TCCR2A=(1<<COM2A1)|(1<<COM2B1); // COM2A et COM2B à 10 pour signaux normaux
TCCR2A |= (1<<WGM21) | (1<<WGM20); // WGM2 à 011 pour mode "fast PWM"
TCCR2B = (1<<CS21) | (1<<CS22); // CS2 à 110 pour un pré-diviseur de 256
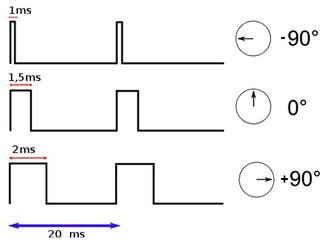
// Une unité de OCR2A et OCR2B représente donc 256/16000000*1000*1000=16 us
// Pour un plateau de 1ms il faut alors 62 unités
// Pour un plateau de 2ms il faut alors 125 unités
}
int main(void){
int a;
for(a=0;a<180;a++){ OCR2A=62+a*63/180; _delay_ms(10); }
for(a=180;a>0;a--){ OCR2A=62+a*63/180; _delay_ms(10); }
}
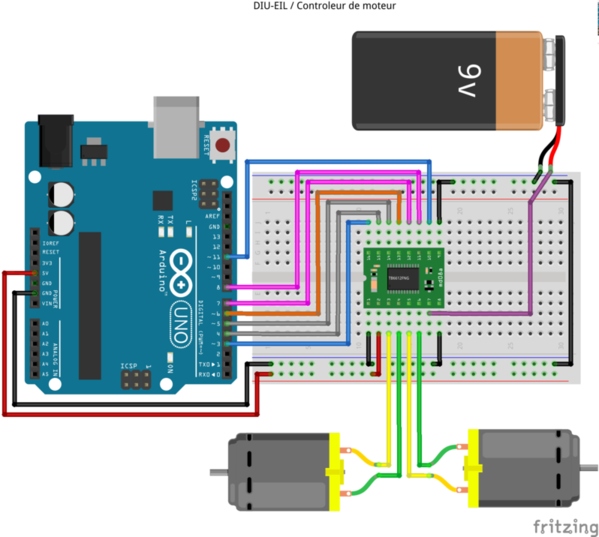
const int STANDBY=6;
const int PWMA=3;
const int AIN1=5;
const int AIN2=4;
const int PWMB=11;
const int BIN1=7;
const int BIN2=8;
const int broches[]={STANDBY,PWMA,AIN1,AIN2,PWMB,BIN1,BIN2,-1};
void setup(void){
int i=0; while(broches[i]>0) pinMode(broches[i++],OUTPUT);
digitalWrite(STANDBY,HIGH); // Activation du contrôleur
digitalWrite(AIN1,HIGH); // Les moteurs dans le même sens
digitalWrite(AIN2,LOW);
digitalWrite(BIN1,HIGH);
digitalWrite(BIN2,LOW);
analogWrite(PWMA,128); // Vitesse modérée
analogWrite(PWMB,128);
}
void loop(void){ }
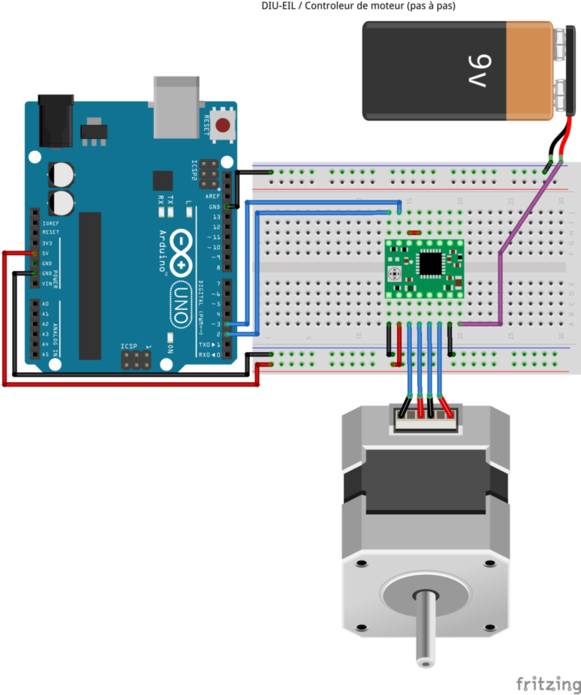
const int DIR=2;
const int STEP=3;
const int CYCLE=200;
void setup(void){
pinMode(DIR,OUTPUT);
pinMode(STEP,OUTPUT);
}
void loop(void){
digitalWrite(DIR,HIGH);
for(int pas=0;pas<CYCLE;pas++){
digitalWrite(STEP,HIGH);
delayMicroseconds(2000);
digitalWrite(STEP,LOW);
delayMicroseconds(2000);
}
delay(1000);
}


#include <Servo.h>
#include "IRLibAll.h"
#define PIN_TRIG A4
#define PIN_ECHO A3
#define PIN_IR 2
IRrecvPCI myReceiver(PIN_IR);
IRdecode myDecoder;
#define PIN_MOT1 11
#define PIN_MOT2 5
#define CENTER_MOT1 88
#define CENTER_MOT2 89
#define FACTOR_MOT1 1
#define FACTOR_MOT2 1
Servo motor1;
Servo motor2;
int speed = 80;
int dir = -1;
long mesureDistance(void){
digitalWrite(PIN_TRIG,LOW);
delayMicroseconds(2);
digitalWrite(PIN_TRIG,HIGH);
delayMicroseconds(10);
digitalWrite(PIN_TRIG,LOW);
long duration_hc=pulseIn(PIN_ECHO,HIGH);
long distance_hc=duration_hc/58;
return distance_hc;
}
void setup(void){
pinMode(PIN_TRIG,OUTPUT);
pinMode(PIN_ECHO,INPUT);
myReceiver.enableIRIn();
motor1.attach(PIN_MOT1);
motor2.attach(PIN_MOT2);
motor1.write(CENTER_MOT1);
motor2.write(CENTER_MOT2);
}
void loop(void){
if(myReceiver.getResults()){
myDecoder.decode();
int value=myDecoder.value&0xff;
if(value==2 || value==4 || value==5 || value==6 || value==8) dir=value;
switch(value){
case 0x11 :
if(speed>0) speed -= 5;
break;
case 0x10 :
if(speed<90) speed += 5;
break;
}
delay(50);
myReceiver.enableIRIn();
}
long distance=mesureDistance();
if(distance<20 && dir==2) dir=5;
switch(dir){
case 2 :
motor1.write(CENTER_MOT1+speed*FACTOR_MOT1);
motor2.write(CENTER_MOT2-speed*FACTOR_MOT2);
break;
case 4 :
motor1.write(CENTER_MOT1-speed/6*FACTOR_MOT1);
motor2.write(CENTER_MOT2-speed/6*FACTOR_MOT2);
break;
case 5 :
motor1.write(CENTER_MOT1);
motor2.write(CENTER_MOT2);
break;
case 6 :
motor1.write(CENTER_MOT1+speed/6*FACTOR_MOT1);
motor2.write(CENTER_MOT2+speed/6*FACTOR_MOT2);
break;
case 8 :
motor1.write(CENTER_MOT1-speed);
motor2.write(CENTER_MOT2+speed);
break;
}
delay(10);
}

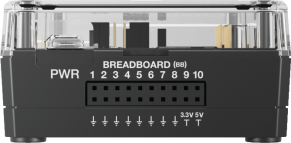
CONNECT DIGITAL.OUT 1 TO BB1 CONNECT DIGITAL.OUT 2 TO BB2 CONNECT DIGITAL.OUT 3 TO BB3 CONNECT DIGITAL.OUT 4 TO BB4 CONNECT ANALOG.OUT 1 TO BB8 CONNECT ANALOG.OUT 2 TO BB9 SET DIGITAL.OUT 1 TO LOW SET DIGITAL.OUT 2 TO HIGH SET DIGITAL.OUT 3 TO LOW SET DIGITAL.OUT 4 TO HIGH SET ANALOG.OUT 1 TO 128 SET ANALOG.OUT 2 TO 128
void setup(){
Serial.begin(9600); // configuration de la vitesse
sonar_init();
controleur_init();
ligne_init();
}
void loop(){
int mesure,ligne,i;
while(1){
if(Serial.available()){ // commande de la Raspberry
int c=Serial.read(); // lecture de l'octet de commande
switch(c){
case 'M': controleur_demarrer(); break;
case 'A': controleur_arreter(); break;
case 'D':
delay(10);
if(Serial.available()){
int v=Serial.read(); // lecture de la vitesse
controleur_moteur_droit(v);
}
break;
case 'G':
delay(10);
if(Serial.available()){
int v=Serial.read(); // lecture de la vitesse
controleur_moteur_gauche(v);
}
break;
case 'U':
mesure=sonar_mesure();
Serial.write(mesure);
break;
case 'L':
for(i=0;i<3;i++){
ligne=ligne_detecte(i);
Serial.write(ligne);
}
break;
}
}
}
}
# cp /usr/share/doc/hostapd/examples/hostapd.conf.gz /etc/hostapd # gunzip /etc/hostapd/hostapd.conf.gz # # Effectuer les modification sur le .conf # grep 'Modif$' /etc/hostapd/hostapd.conf ssid=MonReseauWiFi # Modif country_code=FR # Modif channel=1 # variez les canaux ! Modif wpa=1 # Modif wpa_passphrase=ABCDEFGH # 8 caractères minimum ! Modif wpa_key_mgmt=WPA-PSK # Modif # grep 'Modif$' /etc/default/hostapd DAEMON_CONF=/etc/hostapd/hostapd.conf # Modif # hostapd -d /etc/hostapd/hostapd.conf # Pour tester # service hostapd restart # Pour lancer en tâche de fond
# cat >> /etc/network/interfaces <<!
auto wlan0
iface wlan0 inet static
address 192.168.100.1
netmask 255.255.255.0
!
# grep 'Modif$' /etc/dhcp/dhcpd.conf
option domain-name=monrobot.org # Modif
option domain-name-servers=192.168.100.1 # Modif
authoritative # Modif
subnet 192.168.100.0 netmask 255.255.255.0 { # Modif
range 192.168.100.100 192.168.100.200; # Modif
option routers 192.168.100.1; # Modif
} # Modif
# ifup wlan0
# service isc-dhcp-server restart
import termios
import time
d=open("/dev/ttyACM0")
iflag,oflag,cflag,lflag,ispeed,ospeed,cc=termios.tcgetattr(d)
cc[termios.VMIN]=1
cc[termios.VTIME]=0
cflag=termios.CLOCAL|termios.CREAD|termios.B9600|termios.CS8
termios.tcsetattr(d,termios.TCSANOW,[0,0,cflag,0,ispeed,ospeed,cc])
time.sleep(2)
d.write(b'D\x80')
d.write(b'G\x80')
d.write(b'M')
time.sleep(5)
d.write(b'A')
d.close()
import socket UDP_IP="127.0.0.1" UDP_PORT=5005 sock=socket.socket(socket.AF_INET,socket.SOCK_DGRAM) sock.bind((UDP_IP,UDP_PORT)) while True: data,addr=sock.recvfrom(1024) print "received message:",data
<?php
$server_ip='127.0.0.1';
$server_port=5005;
$message='A';
if($socket=socket_create(AF_INET,SOCK_DGRAM,SOL_UDP)){
socket_sendto($socket,$message,strlen($message),0,$server_ip,$server_port);
}
}
?>
import flask
import flask_serial
import termios
SERIAL_PORT='/dev/ttyACM0'
web=flask.Flask(__name__)
web.config['SERIAL_PORT'] = SERIAL_PORT
web.config['SERIAL_BAUDRATE'] = 9600
web.config['SERIAL_BYTESIZE'] = 8
web.config['SERIAL_PARITY'] = 'N'
web.config['SERIAL_STOPBITS'] = 1
it=False
def init_term():
d=open("/dev/ttyACM0")
iflag,oflag,cflag,lflag,ispeed,ospeed,cc=termios.tcgetattr(d)
cc[termios.VMIN]=1
cc[termios.VTIME]=0
cflag=termios.CLOCAL|termios.CREAD|termios.B9600|termios.CS8
termios.tcsetattr(d,termios.TCSANOW,[0,0,cflag,0,ispeed,ospeed,cc])
d.close()
s=flask_serial.Serial(web)
@web.route('/')
def use_serial():
return 'use flask serial!'
@web.route('/send/',methods=['GET','POST'])
def send_mess():
global it
if not it:
init_term()
it=True
if flask.request.method=='POST':
m=flask.request.form.get('message')
else:
m=flask.request.args.get('message')
print(m)
s.on_send(m)
return 'message sent.'
@s.on_message()
def handle_message(msg):
print("message received:", msg)
if __name__ == '__main__':
web.run(host="0.0.0.0",port=int("8000"),debug=True)
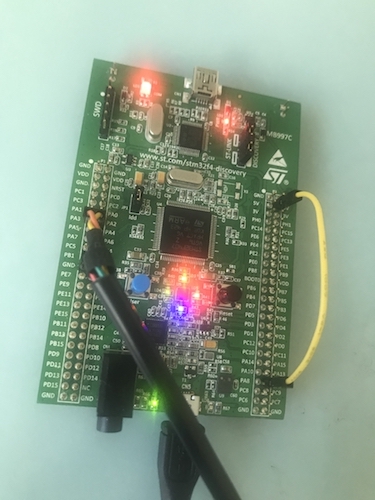



sorties=['B4','A15','A14','A13']
leds=[]
for (i,sortie) in enumerate(sorties):
leds.append(machine.Pin(sortie,machine.Pin.OUT))
while True:
for led in leds:
led.value(1)
time.sleep_ms(500)
led.value(0)
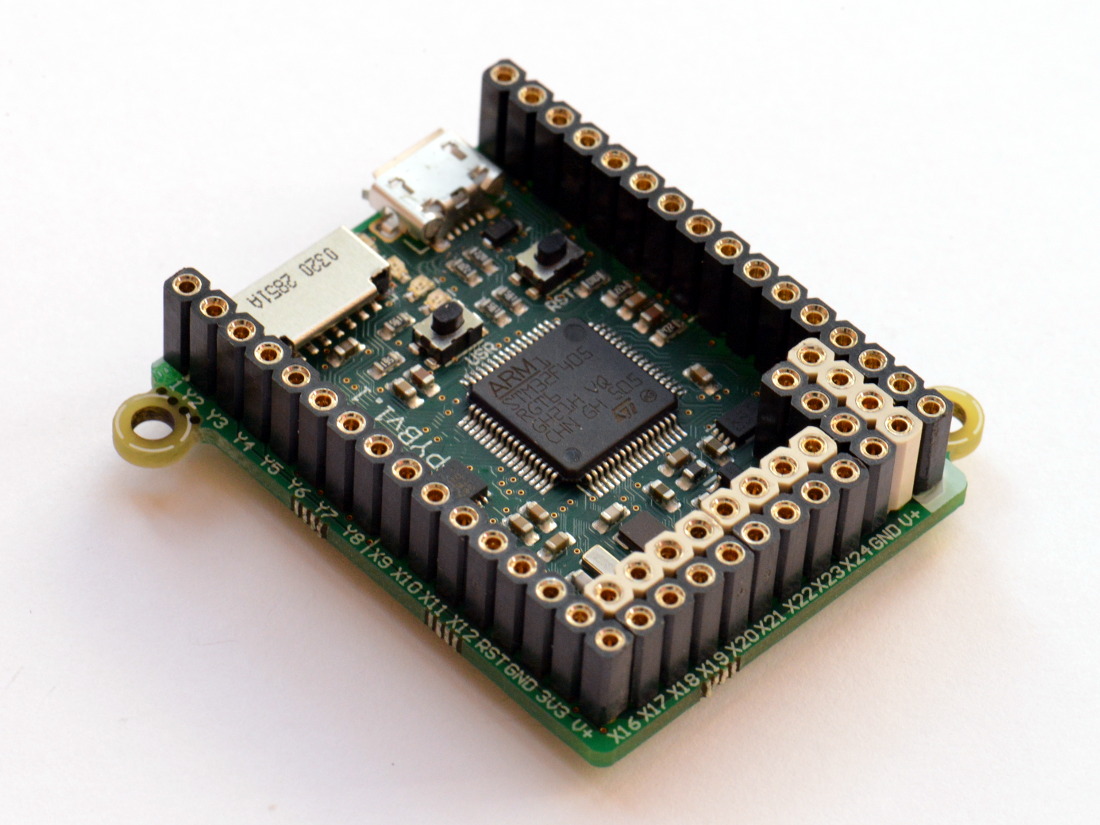
leds=[]
for i in range(0,4):
leds.append(pyb.LED(i+1))
while True:
for led in leds:
led.on()
pyb.delay(500)
led.off()
b=machine.Pin('B3',machine.Pin.IN,machine.Pin.PULL_UP)
l=machine.Pin('B4',machine.Pin.OUT)
while True:
if(b.value()==0) l.value(1)
else l.value(0)
b=pyb.Switch() l=pyb.LED(1) while True: if(b()==1): l.on() else: l.off()
b=pyb.Switch() l=pyb.LED(1) b.callback(lambda: l.toogle())
s=machine.UART(1,9600)
s.init(9600,bits=8,parity=None,stop=1)
while True:
if s.any()>=0:
c=s.read(1)
s.write(c)
ACCEL_ADDR=0x4c
ACCEL_AXIS_X_REG=0x00
ACCEL_AXIS_Y_REG=0x01
ACCEL_AXIS_Z_REG=0x02
ACCEL_MODE_REG=0x07
i2c=machine.I2C(scl=machine.Pin('B6'),sda=machine.Pin('B7'))
alim=machine.Pin('B5',machine.Pin.OUT)
alim.value(1)
i2c.writeto_mem(ACCEL_ADDR,ACCEL_MODE_REG,bytes([1]))
while True:
x=i2c.readfrom_mem(ACCEL_ADDR,ACCEL_AXIS_X_REG,1)
y=i2c.readfrom_mem(ACCEL_ADDR,ACCEL_AXIS_Y_REG,1)
z=i2c.readfrom_mem(ACCEL_ADDR,ACCEL_AXIS_Z_REG,1)
print(x,y,z)
time.sleep_ms(1000)
accel=pyb.Accel() while True: x=accel.x() y=accel.y() z=accel.z() print(x,y,z) pyb.delay(1000)
import microbit
while True:
if microbit.pin11.read_digital()==0:
microbit.pin8.write_digital(1)
else:
microbit.pin8.write_digital(0)
if microbit.pin5.read_digital()==0:
microbit.pin12.write_digital(1)
else:
microbit.pin12.write_digital(0)
microbit.sleep(100)
import microbit I2C_MOTORS_ADDR=0x10 MOTOR_A=0 MOTOR_B=2 def moteurs(sensA,puissA,sensB,puissB): microbit.i2c.write(I2C_MOTORS_ADDR,bytes([MOTOR_A,sensA,puissA])) microbit.i2c.write(I2C_MOTORS_ADDR,bytes([MOTOR_B,sensB,puissB])) def moteurs_init(): microbit.i2c.init() moteurs_init() while True: moteurs(0,128,0,128) microbit.sleep(2000) moteurs(1,64,0,64) microbit.sleep(1000)
import microbit
import machine
import time
def ultrason():
# Envoi d'un plateau de 10 us
microbit.pin1.write_digital(1)
time.sleep_us(10)
microbit.pin1.write_digital(0)
# Lecture de la taille du plateau en retour
t=machine.time_pulse_us(microbit.pin2,1)
# Calcul temps vers distance
d=340*t/20000
return d
def ultrason_init():
microbit.pin1.write_digital(0)
microbit.pin2.read_digital()
moteurs_init()
ultrason_init()
while True:
if ultrason()<=20:
moteurs(0,128,0,128)
else:
moteurs(1,64,0,64)
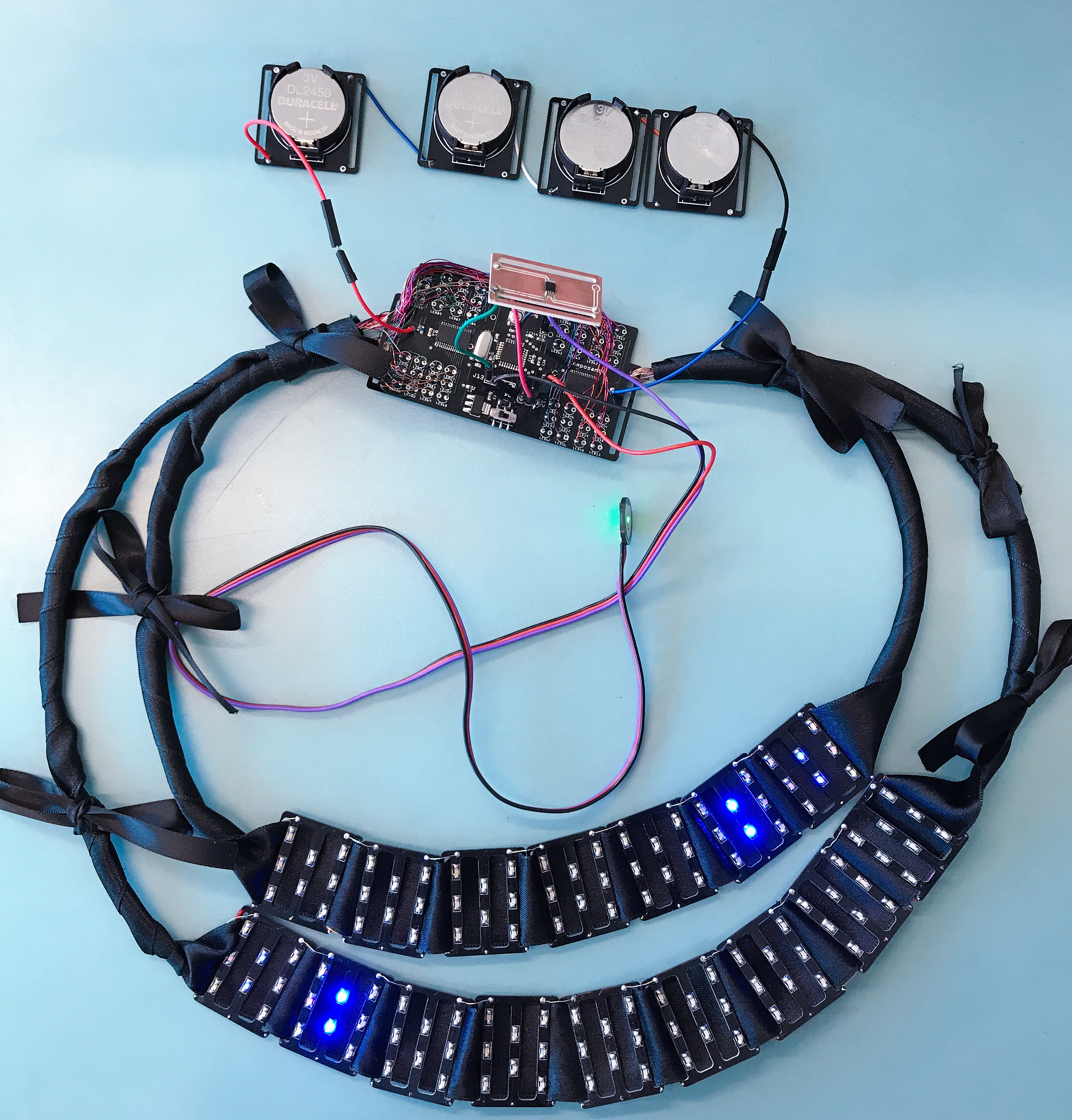
import neopixel def pixels_init(): global pixels pixels=neopixel.NeoPixel(microbit.pin15,4) def pixels_couleurs(c1=(0,0,0),c2=(0,0,0),c3=(0,0,0),c4=(0,0,0)): global pixels pixels[0]=c1 pixels[1]=c2 pixels[2]=c3 pixels[3]=c4 pixels.show()
import microbit
PCA9685_ADDR=0x43
PCA9685_FREQ=60
def PCA9685_init():
microbit.i2c.init()
microbit.i2c.write(PCA9685_ADDR,bytes([0x00,0x10]))
prescale=int(25000000.0/4096.0/PCA9685_FREQ+0.5)
microbit.i2c.write(PCA9685_ADDR,bytes([0xfe,prescale]))
microbit.i2c.write(PCA9685_ADDR,bytes([0x00,0xa0]))
def PCA9685(canal,taux):
adresse=0x06+4*canal
on_l=0x00
on_h=0x00
off_l=0x00
off_h=0x00
if taux==0: off_h=0x10
if taux==100: on_h=0x10
if taux>0 and taux<100:
arret=taux*40
off_l=arret&0x00ff
off_h=arret>>8
microbit.i2c.write(PCA9685_ADDR,bytes([adresse,on_l,on_h,off_l,off_h]))
def PCA9685_LED(r,g,b):
PCA9685(4,100-b)
PCA9685(5,100-g)
PCA9685(6,100-r)
def PCA9685_moteurs(sensA,puissA,sensB,puissB):
PCA9685(0,0) if sensA==0 else PCA9685(0,100)
PCA9685(2,0) if sensA==0 else PCA9685(2,100)
PCA9685(1,puissA)
PCA9685(3,puissB)
PCA9685_init()
PCA9685_LED(0,0,100)
PCA9685_moteurs(0,50,0,50)
Ce document a été traduit de LATEX par HEVEA
{kind=link}