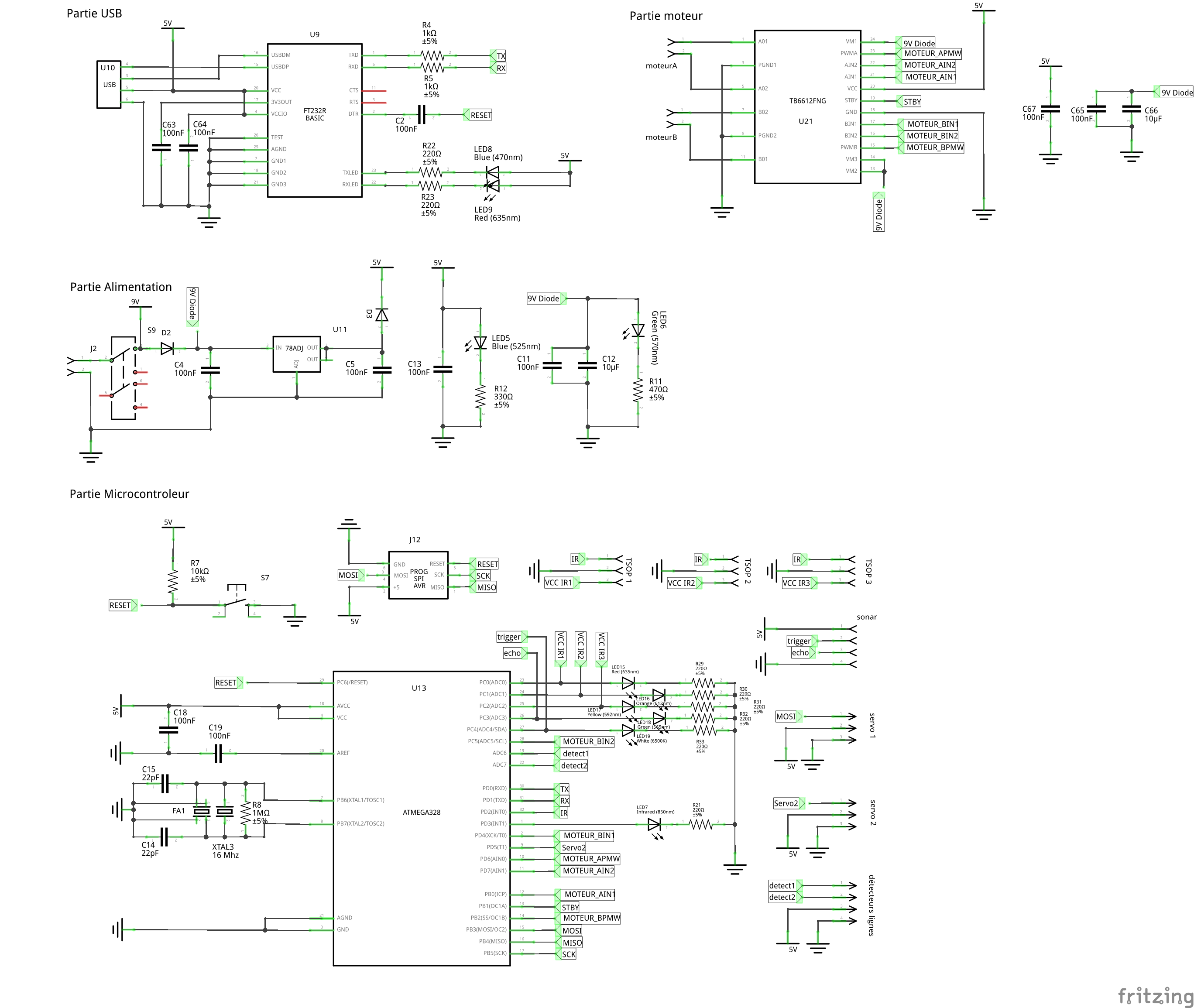
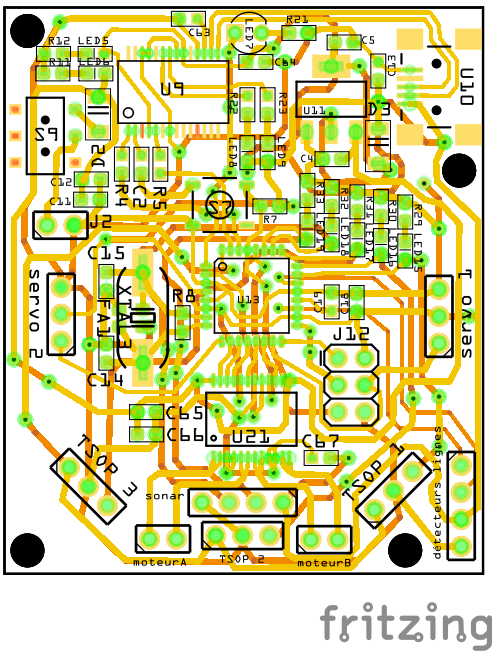
5.3 Etude de cas : contrôleur de robot roulant
Circuit conçu avec Fritzing.
Microcontrôleur : ATMega328p (
Atmel-7810-Automotive-Microcontrollers-ATmega328P_Datasheet.pdf
).
Communication USB / série via un circuit FTDI.
Documents :
le schéma électronique :
le circuit routé :
MicroRobotv10.fzz