
- alimentation sur secteur ;
- un PC comme coeur informatique ;
- un système d’exploitation générique.
Systèmes embarqués |
#include <avr/io.h>
#include <util/delay.h>
int main(void){
DDRB |= 0x01;
while(1){
PORTB ^= 0x01;
_delay_ms(500);
}
}




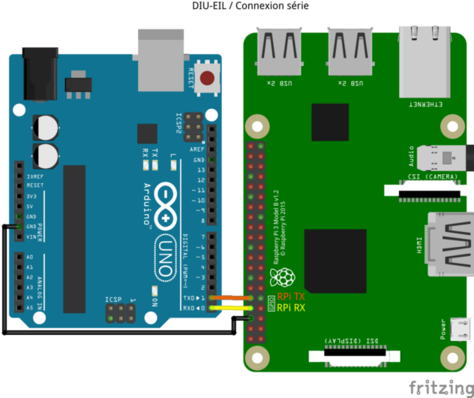
$ minicom -D /dev/ttyACM0 -b 9600 # Arduino avec un microcontrôleur pour interface USB $ minicom -D /dev/ttyUSB0 -b 9600 # Réplique d'Arduino
# apt install gcc-avr avr-libc avrdude
$ avr-gcc -mmcu=atmega328p -DF_CPU=16000000UL -c -Wall -I. -Os timer.c -o timer.o $ avr-gcc -mmcu=atmega328p -g -lm -Wl,--gc-sections -o timer.elf timer.o
$ avr-objcopy -j .text -j .data -O ihex timer.elf timer.hex $ stty -F /dev/ttyACM0 hupcl $ avrdude -F -v -p atmega328p -c stk500v1 -b 115200 -P /dev/ttyACM0 -U flash:w:timer.hex
export CC = avr-gcc
export LD = avr-gcc
export MCU = atmega328p
export FCPU = 16000000
export TARGET_ARCH = -mmcu=$(MCU)
export CFLAGS = -Wall -I. -DF_CPU=$(FCPU) -Os
export LDFLAGS = -g $(TARGET_ARCH) -lm -Wl,--gc-sections
TERM = /dev/ttyACM0
PGMERISP = -c stk500v1 -b 115200 -P $(TERM)
export DUDE = /usr/bin/avrdude -F -v -p $(MCU)
TARGET = timer
C_SRC = $(wildcard *.c)
OBJS = $(C_SRC:.c=.o)
all: $(TARGET).hex
clean:
rm -f $(TARGET).o $(TARGET).hex $(TARGET).elf
$(TARGET).elf: $(OBJS)
$(LD) $(LDFLAGS) -o $@ $(OBJS)
$(TARGET).hex: $(TARGET).elf
avr-objcopy -j .text -j .data -O ihex $(TARGET).elf $(TARGET).hex
upload: $(TARGET).hex
stty -F $(TERM) hupcl # reset
$(DUDE) $(PGMERISP) -U flash:w:$(TARGET).hex
size: $(TARGET).elf
avr-size --format=avr --mcu=$(MCU) $(TARGET).elf
# apt install dfu-programmer
export CC = avr-gcc
export LD = avr-gcc
export MCU = atmega32u4
export FCPU = 16000000
export FLAGS = -mmcu=$(MCU)
export CFLAGS = -Wall $(FLAGS) -DF_CPU=$(FCPU) -Os
export LDFLAGS = $(FLAGS)
export PROGRAMMER = dfu-programmer
TARGET = pad
SOURCES = $(wildcard *.c)
OBJECTS = $(SOURCES:.c=.o)
all: $(TARGET).hex
clean:
rm -f *.o $(TARGET).hex $(TARGET)
$(TARGET): $(OBJECTS)
$(TARGET).hex: $(TARGET)
avr-objcopy -j .text -j .data -O ihex $(TARGET) $(TARGET).hex
upload: $(TARGET).hex
$(PROGRAMMER) $(MCU) erase
$(PROGRAMMER) $(MCU) flash $(TARGET).hex
$(PROGRAMMER) $(MCU) reset
size: $(TARGET)
avr-size --format=avr --mcu=$(MCU) $(TARGET)
include <stddef.h>
#include <string.h>
#include <avr/io.h>
#include "serial.h"
#define MAX_BUFFER 16
#define getProgramCounter(x) { asm volatile ( "rcall . \n\t pop r16 \n\t pop r17 \n\t mov %B0, r16 \n\t mov %A0, r17" : "=a" (x) : ); x--; x *= 2; }
char *digits="0123456789ABCDEF";
int base=10;
unsigned int number=0;
unsigned int save=0;
char buffer[MAX_BUFFER+1];
void *next;
int main(void)
{
buffer[MAX_BUFFER]='\0';
goto start;
number_put:
if(base>strlen(digits)) goto *next;
char *p=buffer+MAX_BUFFER;
unsigned int copy=number;
_number_put:
int digit=copy%base;
*--p=digits[digit];
copy /= base;
if(copy && p>buffer) goto _number_put;
serial_print(p);
goto *next;
start:
getProgramCounter(save);
serial_init(9600);
serial_print("Understanding Program Counter!\n");
base=16;
goto print_start_label;
print_start_label:
number=2*(unsigned int)&&start;
next=&&print_start_PC;
goto number_put;
print_start_PC:
serial_print("\n");
number=save;
next=&&print_proc;
goto number_put;
print_proc:
serial_print("\n");
number=2*(unsigned int)&&number_put;
next=&&print_end;
goto number_put;
print_end:
serial_print("\n");
number=2*(unsigned int)&&end;
next=&&end;
goto number_put;
end:
serial_print("\n");
return 0;
}
#include <stddef.h>
#include <string.h>
#include <avr/io.h>
#include "serial.h"
#define MAX_BUFFER 16
static char *digits="0123456789ABCDEF";
void number_put(unsigned int number,int base){
char buffer[MAX_BUFFER+1];
buffer[MAX_BUFFER]='\0';
if(base>strlen(digits)) return;
char *p=buffer+MAX_BUFFER;
unsigned int copy=number;
do{
int digit=copy%base;
*--p=digits[digit];
copy /= base;
} while(copy && p>buffer);
serial_print(p);
return;
}
void first_proc(int a){
serial_print("\nfirst function a parameter: ");
number_put(a,10);
serial_print("\nSP in first function: ");
number_put(SP,16);
if(a>0) first_proc(a-1);
return;
}
struct big{
long int a,b,c,d,e,f;
};
void second_proc(struct big b){
serial_print("\nSP in second function: ");
number_put(SP,16);
return;
}
int main(void)
{
serial_init(9600);
serial_print("\n\n\nUnderstanding Stack Pointer!");
serial_print("\nSP at main begin: ");
number_put(SP,16);
first_proc(0);
struct big param;
second_proc(param);
first_proc(5);
serial_print("\nSP at main end: ");
number_put(SP,16);
serial_print("\n");
return 0;
}
int main(void)
{
buffer[MAX_BUFFER]='\0';
goto start;
number_get:
if(base>strlen(digits)) goto *next;
number=0;
_number_get:
char c=serial_get();
char *f=strchr(digits,c);
int pos=f?f-digits:-1;
if(f==NULL || pos>=base) goto *next;
number *= base;
number += pos;
serial_put(c);
goto _number_get;
number_put:
if(base>strlen(digits)) goto *next;
char *p=buffer+MAX_BUFFER;
unsigned int copy=number;
_number_put:
int digit=copy%base;
*--p=digits[digit];
copy /= base;
if(copy && p>buffer) goto _number_put;
serial_print(p);
goto *next;
start:
serial_init(9600);
serial_print("Addition Calculator\n");
goto read_first_number;
read_first_number:
serial_print("first number: ");
next=&&read_second_number;
goto number_get;
read_second_number:
op1=number;
serial_print("\nsecond number: ");
next=&&make_addition;
goto number_get;
make_addition:
op2=number;
number=op1+op2;
serial_print("\naddition: ");
next=&&end;
goto number_put;
end:
serial_print("\n");
return 0;
}
int number_get(int base){
if(base>strlen(digits)) return 0;
int number=0;
while(1){
char c=serial_get();
char *f=strchr(digits,c);
int pos=f?f-digits:-1;
if(f==NULL || pos>=base) break;
number *= base;
number += pos;
serial_put(c);
}
return number;
}
void number_put(unsigned int number,int base){
if(base>strlen(digits)) return;
if(number){
int digit=number%base;
number_put(number/base,base);
serial_put(digits[digit]);
}
return;
}
int main(void)
{
serial_init(9600);
serial_print("Addition Calculator\n");
serial_print("first number: ");
unsigned int op1=number_get(BASE);
serial_print("\nsecond number: ");
unsigned int op2=number_get(BASE);
unsigned int result=op1+op2;
serial_print("\naddition: ");
number_put(result,BASE);
serial_print("\n");
return 0;
}
int main(void)
{
unsigned int op1,op2;
stdio_init(9600);
printf("Addition Calculator\n");
printf("first number: ");
scanf("%d",&op1);
printf("\nsecond number: ");
scanf("%d",&op2);
unsigned int result=op1+op2;
printf("\naddition: %d\n",result);
return 0;
}
MULS r10,r11
#include <avr/io.h>
void wdt_signaler(void){
asm volatile ("wdr"); // Réinitialisation du minuteur
}
void wdt_activer(unsigned char prescaler){
cli();
wdt_signaler();
WDTCSR |= (1<<WDCE) | (1<<WDE); // Demande d'une modification du minuteur
WDTCSR = (1<<WDE) | (0<<WDEI) | prescaler; // Multiplicateur de 0x00 à 0x09
// Génération d'une réinitialisation du CPU
sei();
}
void wdt_desactiver(void){
cli();
wdt_signaler();
__disable_interrupt();
MCUSR &= ~(1<<WDRF); // Désactivation d'un déclenchement du minuteur
WDTCSR |= (1<<WDCE) | (1<<WDE); // Demande d'une modification du minuteur
WDTCSR = 0x00; // Désactivation complète du minuteur
sei();
}
int main(void){
wdt_activer((0<<WDP3)|(1<<WDP2)|(1<<WPD1)|(1<<WPD0)); // Minuteur à environ 2s
while(1){
// faire quelque chose en quelques ms
wdt_signaler();
}
}
#include <avr/wdt.h>
#include <avr/sleep.h>
int main(void){
wdt_disable(); // Désactivation du minuteur au réveil
... // Code pour faire ce qu'il y a faire
wdt_enable(WDTO_2S); // Réveil prévu dans environ 2 secondes
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // Mode sommeil profond
sleep_mode(); // Zoup au dodo
}
#include <avr/wdt.h>
#include <avr/sleep.h>
int main(void){
wdt_disable(); // Désactivation du minuteur au réveil
... // Code pour faire ce qu'il y a faire
wdt_enable(WDTO_2S); // Réveil prévu dans environ 2 secondes
SMCR &= ~(1<<SM2);
SMCR |= (1<<SM1);
SMCR &= ~(1<<SM0);
SMCR |= (1<<SE);
asm volatile("sleep");
SMCR &= ~(1<<SE);
}
avrdude -c stk500v1 -p atmega328p -P /dev/ttyUSB0 -b 19200 -U lfuse:w:0x62:m
avrdude -c stk500v1 -p atmega328p -P /dev/ttyUSB0 -b 19200 -U lfuse:w:0x4E:m
CLKSEL0 = 0b00010101; // sélection de l'horloge externe CLKSEL1 = 0b00001111; // minimum de 8Mhz CLKPR = 0b10000000; // modification du diviseur d'horloge (CLKPCE=1) CLKPR = 0; // 0 pour pas de diviseur (diviseur de 1)
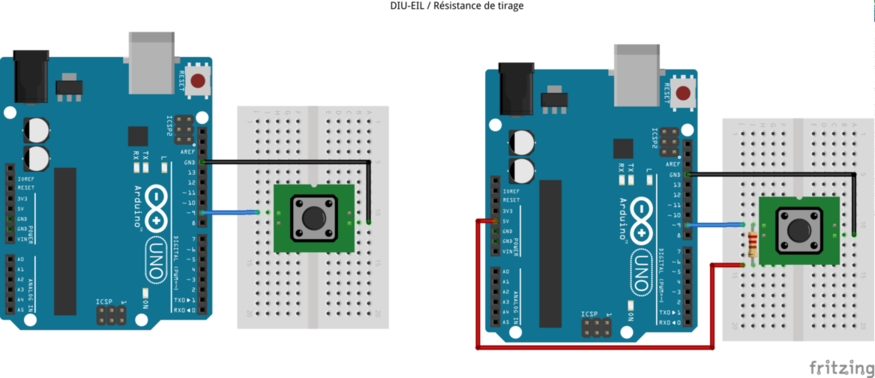
const int LED=8;
const int BOUTON=9;
void setup(){
pinMode(LED,OUTPUT); // Sortie pour la LED
pinMode(BOUTON,INPUT_PULLUP); // Entrée pour le bouton (résistance de tirage)
}
void loop(){
int etat=digitalRead(BOUTON); // Lecture de l'état du bouton
if(etat==HIGH) digitalWrite(LED,LOW); // LED éteinte
else digitalWrite(LED,HIGH); // LED allumée
}
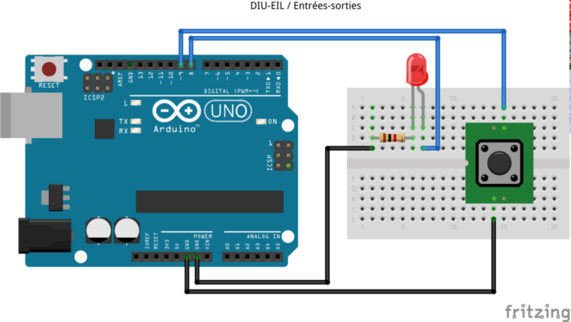
#include <avr/io.h>
#define LED PB0
#define BOUTON PB1
int main(void){
DDRB |= (0x01<<LED); // Sortie pour la LED
DDRB &= ~(0x01<<BOUTON); // Entrée pour le bouton
PORTB |= (0x01<<BOUTON); // Configuration de la résistance de tirage
while(1){
if(PINB & (0x01<<BOUTON)) PORTB &= ~(0x01<<LED); // LED éteinte
else PORTB |= (0x01<<LED); // LED allumée
}
}
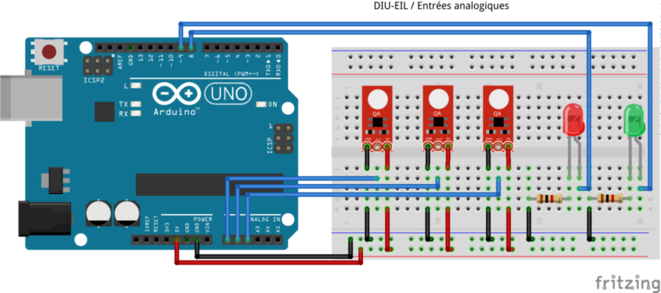
const int LED_G=8;
const int LED_D=9;
const int LIGNE_G=A0;
const int LIGNE_M=A1;
const int LIGNE_D=A2;
const int LIMITE=128;
void setup(){
pinMode(LED_G,OUTPUT);
pinMode(LED_D,OUTPUT);
}
void loop(){
int lg=analogRead(LIGNE_G); // Valeurs des détecteurs de ligne
int lm=analogRead(LIGNE_M);
int ld=analogRead(LIGNE_D);
if(lg<LIMITE) digitalWrite(LED_D,HIGH); // Ligne perdue à gauche, tourner à droite
if(ld<LIMITE) digitalWrite(LED_G,HIGH); // Ligne perdue à droite, tourner à gauche
if(lm<LIMITE){ // Sur la ligne continuer tout droit
digitalWrite(LED_D,LOW);
digitalWrite(LED_G,LOW);
}
}
#include <avr/io.h>
#define ADFR 5
#define LIMITE 64
void ad_init(unsigned char channel){ // Sélectionne un canal
ADCSRA |= (1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); // Division de fréquence 128 => 125KHz
ADCSRA &= ~(1<<ADFR); // Mode conversion unique
ADMUX |= (1<<REFS0)|(1<<ADLAR); // Référence de mesure AVCC
ADMUX=(ADMUX&0xf0)|channel; // Selection du canal
ADCSRA|=(1<<ADEN); // Convertisseur activé
}
unsigned int ad_capture(void){ // Acquisition de tension
ADCSRA|=(1<<ADSC); // Début de conversion
while(bit_is_set(ADCSRA, ADSC)); // Attente de la fin de conversion
return ADCH; // Résultat sur 8 bits car ADLAR=1
}
int main(void){
DDRB |= 0x03;
int lg,lm,ld;
while(1){
ad_init(0); lg=ad_capture();
ad_init(1); lm=ad_capture();
ad_init(2); ld=ad_capture();
if(lg<LIMITE) PORTB |= 0x02; // Ligne perdue à gauche, tourner à droite
if(ld<LIMITE) PORTB |= 0x01; // Ligne perdue à droite, tourner à gauche
if(lm<LIMITE) PORTB &= ~0x03; // Sur la ligne continuer tout droit
}
}
void setup(){
Serial.begin(9600); // configuration de la vitesse
}
void loop(){
while(1){ // il y a de l'écho
if(Serial.available()){ // un octet disponible ?
int c=Serial.read(); // lecture de l'octet reçu
Serial.write(c); // envoi d'un octet
}
}
#include <avr/io.h>
void serie_init(long int vitesse){
UBRR0=F_CPU/(((unsigned long int)vitesse)<<4)-1; // configure la vitesse
UCSR0B=(1<<TXEN0 | 1<<RXEN0); // autorise l'envoi et la réception
UCSR0C=(1<<UCSZ01 | 1<<UCSZ00); // 8 bits et 1 bit de stop
UCSR0A &= ~(1 << U2X0); // double vitesse désactivée
}
void serie_envoyer(unsigned char c){
loop_until_bit_is_set(UCSR0A,UDRE0);
UDR0=c;
}
unsigned char serie_recevoir(void){
loop_until_bit_is_set(UCSR0A, RXC0);
return UDR0;
}
int main(void){
serie_init(9600);
while(1){
unsigned char c=serie_recevoir();
serie_envoyer(c);
}
return 0;
}
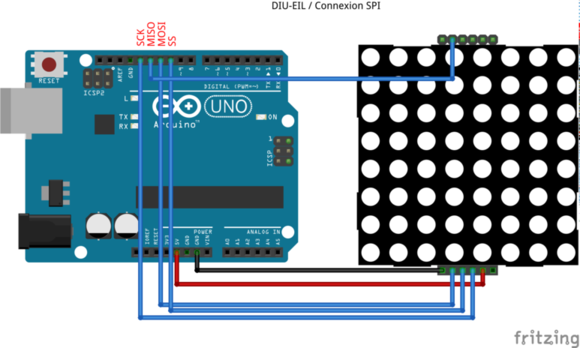
#include <SPI.h>
void setup(void){
SPI.begin(); // Initialisation SPI
SPI.setClockDivider(SPI_CLOCK_DIV8); // Horloge F_CPU/64
digitalWrite(SS,HIGH); // Désactive le périphérique
}
void loop(void){
digitalWrite(SS,LOW);
for(i=0;i<64;i++) SPI.transfer(0xe0);
digitalWrite(SS,HIGH);
}
#include <avr/io.h>
#define SPI_DDR DDRB
#define SPI_PORT PORTB
#define SPI_SS 2
#define SPI_MOSI 3
#define SPI_MISO 4
#define SPI_SCK 5
void spi_init(void){ // Initialisation du bus SPI
SPI_DDR |= (1<<SPI_MOSI)|(1<<SPI_SCK)|(1<<SPI_SS); // Définition des sorties
SPI_DDR &= ~(1<<SPI_MISO); // Définition de l'entrée
SPI_PORT |= (1<<SPI_SS); // Désactivation du périphérique
SPCR = (1<<SPE)|(1<<MSTR)|(1<<SPR1); // Activation SPI (SPE) en état maître (MSTR)
// horloge F_CPU/64 (SPR1=1,SPR0=0)
}
void spi_activer(void){ // Activer le périphérique
SPI_PORT &= ~(1<<SPI_SS); // Ligne SS à l'état bas
}
void spi_desactiver(void){ // Désactiver le périphérique
SPI_PORT |= (1<<SPI_SS); // Ligne SS à l'état haut
}
uint8_t spi_echange(uint8_t envoi){ // Communication sur le bus SPI
SPDR = envoi; // Octet a envoyer
while(!(SPSR & (1<<SPIF))); // Attente fin envoi (drapeau SPIF du statut)
return SPDR; // Octet reçu
}
int main(void){
spi_init();
int i;
spi_activer();
for(i=0;i<64;i++) spi_echange(0xe0); // Que de rouge
spi_desactiver();
}
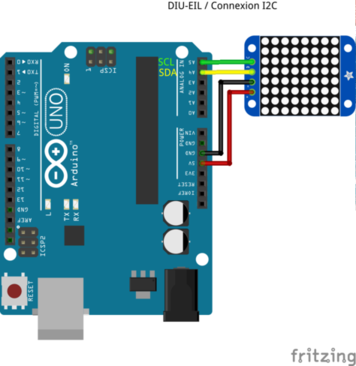
#define MATRICE_REG_LUMINE 0xE0
#define MATRICE_SYSTEME 0x20
#define MATRICE_AFFICHAGE 0x80
#define MATRICE_ADR_I2C 0x70
void luminosite(uint8_t adr_i2c,uint8_t lum){
if(lum>15) lum=15;
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_REG_LUMINE|lum);
Wire.endTransmission();
}
void matrice_init(uint8_t adr_i2c){
Wire.begin();
Wire.setClock(400000UL);
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_SYSTEME|1); // Démarre l'horloge
Wire.endTransmission();
Wire.beginTransmission(adr_i2c);
Wire.write(MATRICE_AFFICHAGE|1); // Alimente les LED
}
void matrice_afficher(uint8_t adr_i2c,uint8_t image[8]){
Wire.beginTransmission(i2c_addr);
Wire.write((uint8_t)0x00); // Adresse de départ
for(uint8_t i=0;i<8;i++){
Wire.write(image[i]);
Wire.write(0);
}
Wire.endTransmission();
}
#include <avr/io.h>
#define ERROR 0
#define SUCCESS 1
#define IIC_START 0x08
#define IIC_RESTART 0x10
#define IIC_WADDR_ACK 0x18
#define IIC_WDATA_ACK 0x28
#define IIC_RADDR_ACK 0x40
#define IIC_RDATA_ACK 0x50
#define IIC_RDATA_NACK 0x58
#define SCL_CLOCK 400000L // En Hertz
void i2c_init(void){
TWSR=0; // Pas de multiplicateur d'horloge
TWBR=((F_CPU/SCL_CLOCK)-16)/2; // Fréquence de l'horloge i2c
TWCR=(1<<TWEN); // Activation de l'i2c matériel
}
static void i2c_start(void){ // Envoi d'un start
TWCR=(1<<TWINT)|(1<<TWSTA)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0); // Attente de fin d'envoi
}
static void i2c_stop(void){ // Envoi d'un stop
TWCR=(1<<TWINT)|(1<<TWSTO)|(1<<TWEN);
}
static uint8_t i2c_statut(void){ // Etat de la dernière transmission
return (TWSR & 0xF8);
}
void i2c_ecrire(uint8_t octet){ // Envoi d'un octet sur le bus i2c
TWDR=octet; // Ecriture de l'octet à envoyer
TWCR=(1<<TWINT)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0); // Attente de fin d'envoi
}
uint8_t i2c_lire_ack(void){ // Lecture d'un octet sur i2c avec accusé positif
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while((TWCR & (1<<TWINT))==0);
return TWDR;
}
uint8_t i2c_lire_nack(void){ // Lecture d'un octet sur i2c avec accusé négatif
TWCR=(1<<TWINT)|(1<<TWEN);
while((TWCR & (1<<TWINT))==0);
return TWDR;
}
uint8_t i2c_ecrire_registre(uint8_t adr_i2c,uint8_t reg_val,unsigned char stop){
// Modification de la valeur d'un registre
int statut;
i2c_start();
statut=i2c_statut(); if(status!=IIC_START && status!=IIC_RESTART) return ERROR;
i2c_ecrire(adr_i2c<<1);
statut=i2c_statut(); if(status!=IIC_WADDR_ACK) return ERROR;
i2c_ecrire(reg_val);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
if(stop) i2c_stop();
return SUCCESS;
}
uint8_t i2c_ecrire_donnee(uint8_t adr_i2c,uint8_t adresse,uint8_t donnee){
// Ecriture dans la mémoire de l'esclave
int statut;
i2c_start();
statut=i2c_statut(); if(status!=IIC_START && status!=IIC_RESTART) return ERROR;
i2c_ecrire(adr_i2c<<1);
statut=i2c_statut(); if(status!=IIC_WADDR_ACK) return ERROR;
i2c_ecrire(reg_val);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
i2c_ecrire(donnee);
statut=i2c_statut(); if(status!=IIC_WDATA_ACK) return ERROR;
TWI_stop();
return SUCCESS;
}
#define MATRICE_REG_LUMINE 0xE0
#define MATRICE_SYSTEME 0x20
#define MATRICE_AFFICHAGE 0x80
#define MATRICE_ADR_I2C 0x70
int matrice_afficher(uint8_t image[8]){
int dim=0x01; // Ecriture de quelques registres de la matrice
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_SYSTEME|1,1);
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_REG_LUMINE|dim,1);
i2c_ecrire_registre(MATRICE_ADR_I2C,MATRICE_AFFICHAGE|1,1);
int i; // Envoi de chaque ligne
for(i=0;i<8;i++) i2c_ecrire_donnee(MATRICE_ADR_I2C,2*i,image[i]);
return 0;
}
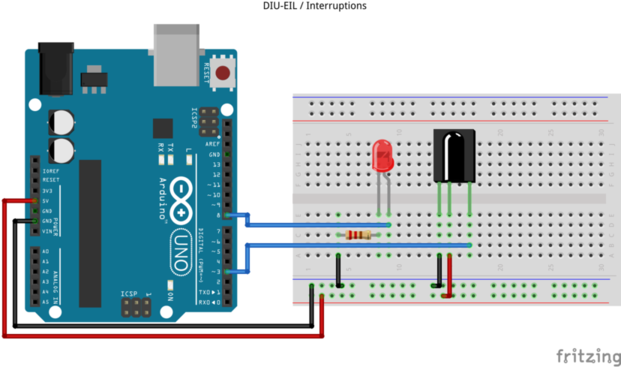
const byte LED=8;
const byte INT=3;
int etat=LOW;
void clignote(){ // Procédure d'interruption
etat=(etat==LOW)?HIGH:LOW;
digitalWrite(LED,etat);
}
void setup(){
pinMode(LED,OUTPUT); // Sortie pour la LED
pinMode(INT,INPUT); // Entrée pour le détecteur infrarouge
attachInterrupt(digitalPinToInterrupt(INT),clignote,CHANGE);
}
void loop(){} // Rien dans la boucle principale
#include <avr/io.h>
#include <avr/interrupt.h>
#define INT_BAS 0
#define INT_CHANGE 1
#define INT_DESCENTE 2
#define INT_MONTEE 3
void interruption_init // Initialisation d'interruption
(uint8_t num,uint8_t mode){
uint8_t isc0=0,isc1=0;
switch(mode){
case INT_BAS: // Interruption sur niveau bas
isc0=0; isc1=0; break;
case INT_CHANGE: // Interruption sur changement d'état
isc0=1; isc1=0; break;
case INT_DESCENTE: // Interruption sur front descendant
isc0=0; isc1=1; break;
case INT_MONTEE: // Interruption sur front montant
isc0=1; isc1=1; break;
}
if(num==0){ // Configuration pour INT0
EICRA |= (isc1<<ISC01)|(isc0<<ISC00);
EIMSK |= (1<<INT0);
}
if(num==1){ // Configuration pour INT1
EICRA |= (isc1<<ISC11)|(isc0<<ISC10);
EIMSK |= (1<<INT1);
}
}
ISR(INT1_vect){ // Procédure d'interruption
PORTB ^= 0x01; }
int main(void){
DDRB |= 0x01;
DDRD &= ~0x08;
interruption_init(1,INT_CHANGE);
sei(); // Autorisation des interruptions
while(1);
return 0;
}
#include <avr/io.h>
#include <avr/interrupt.h>
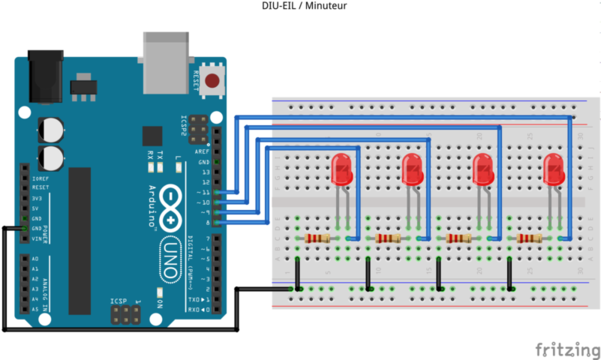
#define CTC1 WGM12 // Meilleur nom pour le bit
#define PERIODE 1000
void init_minuteur(int diviseur,long periode){
TCCR1A=0; // Le mode choisi n'utilise pas ce registre
TCCR1B=(1<<CTC1); // Réinitialisation du minuteur sur expiration
switch(diviseur){
case 8: TCCR1B |= (1<<CS11); break;
case 64: TCCR1B |= (1<<CS11 | 11<<CS10); break;
case 256: TCCR1B |= (1<<CS12); break;
case 1024: TCCR1B |= (1<<CS12 | 1<<CS10); break;
}
// Un cycle prend 1/F_CPU secondes.
// Un pas de compteur prend diviseur/F_CPU secondes.
// Pour une periode en millisecondes, il faut (periode/1000)/(diviseur/F_CPU) pas
// soit (periode*F_CPU)/(1000*diviseur)
OCR1A=F_CPU/1000*periode/diviseur; // Calcul du pas
TCNT1=0; // Compteur initialisé
TIMSK1=(1<<OCIE1A); // Comparaison du compteur avec OCR1A
}
ISR(TIMER1_COMPA_vect){ // Procédure d'interruption
int led=(PINB&0x0f);
led >>= 1; if(led==0) led=0x08;
PORTB &= 0xf0; PORTB |= led;
}
int main(void){
DDRB |= 0x0f; // Chenillard sur 4 LED
PORTB &= ~0x0f; // LED éteintes
init_minuteur(256,PERIODE);
sei();
while(1);
}
#include <avr/io.h>
void ad_init(unsigned char channel){
ADCSRA = (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0); // Résolution maximale
ADCSRB = (((channel&0x20)==0?0:1)<<MUX5); // Sélection du canal
ADMUX = channel&0x1f;
ADMUX |= (0<<REFS1) | (1<<REFS0); // Référence de mesure AVCC
ADMUX |= (1<<ADLAR); // Alignement gauche de la valeur
ADCSRA |= (1<<ADEN); // Convertisseur activé
}
unsigned int ad_capture(void){
ADCSRA |= (1<<ADSC); // Début de conversion
while(ADCSRA & (1<<ADSC)); // Attente de la fin de conversion
return ADCH; // Un seul octet retourné
}
#include <stdint.h>
#include <avr/io.h>
#define SPI_DDR DDRB
#define SPI_PORT PORTB
#define SPI_SS 0
#define SPI_SCK 1
#define SPI_MOSI 2
#define SPI_MISO 3
void spi_init(void){ // Initialisation du bus SPI
{
SPI_DDR |= (1<<SPI_MOSI)|(1<<SPI_SCK)|(1<<SPI_SS);
SPI_DDR &= ~(1<<SPI_MISO);
SPI_PORT |= (1<<SPI_SS);
SPI_PORT |= (1<<SPI_MISO);
SPSR = (1<<SPI2X);
SPCR = (1<<SPE)|(1<<MSTR)|(1<<CPOL)|(1<<CPHA);
}
void spi_activer(void){ // Activer le périphérique
SPI_PORT &= ~(1<<SPI_SS); // Ligne SS à l'état bas
}
void spi_desactiver(void){ // Désactiver le périphérique
SPI_PORT |= (1<<SPI_SS); // Ligne SS à l'état haut
}
uint8_t spi_echange(uint8_t envoi){ // Communication sur le bus SPI
{
SPDR = envoi;
while(!(SPSR & (1<<SPIF)));
return SPDR;
}


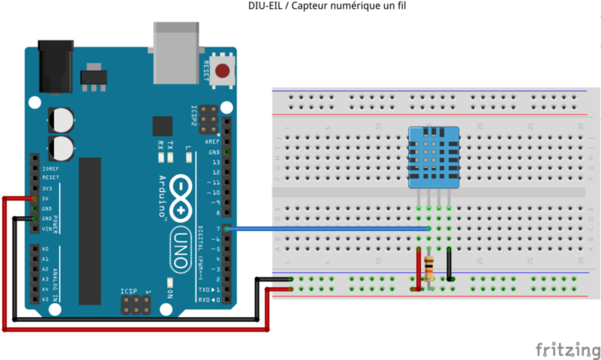
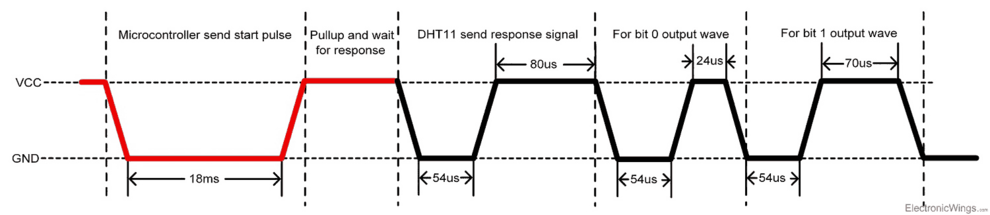
#include <avr/io.h>
#include <util/delay.h>
#define DTH_ERR_TIMEOUT -1
#define DTH_ERR_CHECKSUM -2
typedef struct{
int temperature;
int humidity ;
} dht_values;
#define DTH_DDR DDRD
#define DTH_PORT PORTD
#define DTH_PIN PIND
#define DTH_IO 7
#define DTH_ANSWER_SIZE 40
#define DTH_TIMEOUT (F_CPU/40000) // 2,5 ms
#define DTH_WAIT_LOW_MS 20
#define DTH_WAIT_HIGH_US 40
#define DTH_LOOP_CYCLES 2
#define DTH_HIGH_DELAY_US 40
static void dht_trigger(void){
uint8_t mask=(1<<DTH_IO);
DTH_DDR |= mask;
DTH_PORT &= ~mask;
_delay_ms(DTH_WAIT_LOW_MS);
DTH_PORT |= mask;
_delay_us(DTH_WAIT_HIGH_US);
DTH_DDR &= ~mask;
}
int dht_get(dht_values *values){
uint8_t bits[DTH_ANSWER_SIZE/8];
int i,l;
dht_trigger(); // Trigger answer
uint8_t mask=(1<<DTH_IO); // Check acknowledgment
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)==0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)!=0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(i=0;i<DTH_ANSWER_SIZE;i++){ // Read values
if(i%8==0) bits[i/8]=0;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)==0;l--); if(l<0) return DTH_ERR_TIMEOUT;
for(l=DTH_TIMEOUT;l>=0 && (DTH_PIN&mask)!=0;l--); if(l<0) return DTH_ERR_TIMEOUT;
uint32_t time=l*DTH_LOOP_CYCLES/(F_CPU/1000000L);
bits[i/8] <<= 1;
if(time<DTH_HIGH_DELAY_US) bits[i/8] |= 0x01;
}
uint8_t sum=bits[0]+bits[2]; // Verify checksum
if(sum!=bits[4]) return DTH_ERR_CHECKSUM;
values->humidity=bits[0]; // Convert values
values->temperature=bits[2];
return 0;
}
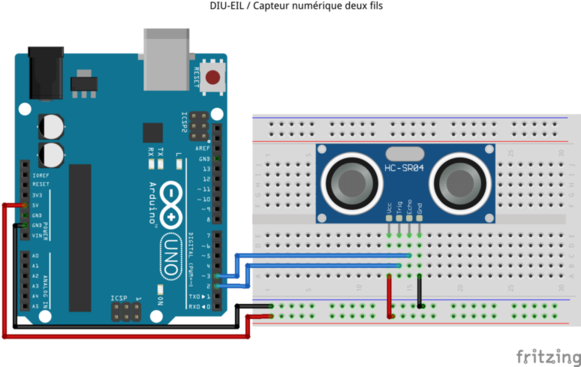
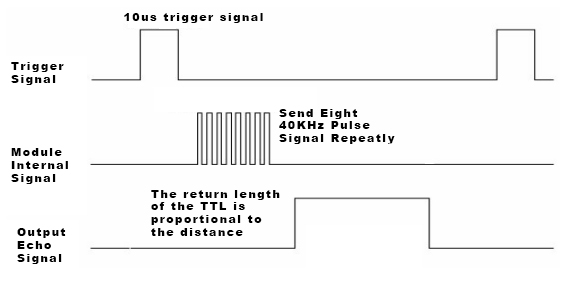
const int LED=13;
const int trigger=2;
const int echo=3;
void setup(){
pinMode(trigger,OUTPUT); // Broche pour activer la mesure (sortie)
pinMode(echo,INPUT); // Broche pour lire la valeur (entrée)
pinMode(LED,OUTPUT);
}
void loop(){
digitalWrite(trigger,LOW); delayMicroseconds(5); // Activer
digitalWrite(trigger,HIGH); delayMicroseconds(10);
digitalWrite(trigger,LOW);
long duree=pulseIn(echo,HIGH); // Mesurer
long distance=(duree/2)/29.1;
if(distance<20) digitalWrite(LED,HIGH); // Réagir
else digitalWrite(LED,LOW);
delay(500);
}
#include <avr/io.h>
#include <util/delay.h>
#define US_DDR DDRD
#define US_PORT PORTD
#define US_PIN PIND
#define US_TRIGGER 2
#define US_ECHO 3
void sonar_init(void){ // Initialiser le sonar
US_DDR |= (1<<US_TRIGGER); // Broche pour activer la mesure (sortie)
US_DDR &= ~(1<<US_ECHO); // Broche pour lire la valeur (entrée)
}
uint32_t sonar_mesure(void){ // Mesurer une distance
uint8_t statut=0;
uint32_t temps=0;
_delay_us(2); US_PORT |= (1<<US_TRIGGER); // Activer
_delay_us(10); US_PORT &= ~(1 << US_TRIGGER);
while(!statut){
while(US_PIN&(1<<US_ECHO)){ // Mesure la durée du signal haut
temps++;
statut=1;
}
}
return temps*0.00862; // Conversion en cm
}

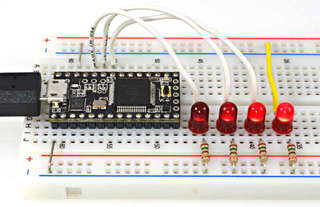
const int LED=8;
void setup(void){
for(int i=0;i<4;i++) pinMode(LED+i,OUTPUT);
for(int i=0;i<4;i++) analogWrite(LED+i,(100-25*i)*255/100);
}
void loop(void){ }
#include <avr/io.h>
#define PWM_DDR DDRD
#define PWM_PORT PORTD
#define PWM1 5
#define PWM2 6
void PWM_init(void){ // Initialisation de la PWM
PWM_DDR |= (1<<PWM1)|(1<<PWM2); // Les ports PWM sont des sorties
TCCR0A |= (1<<COM0A1)|(1<<COM0B1); // Les ports PWM se comportent normalement
TCCR0A |= (1<<WGM01)|(1<<WGM00); // Minuteur mis en mode PWM
TCCR0B |= (1<<CS00); // Pas de pré-diviseur, démarre le compteur
}
int main(void){
PWM_init();
int pwm=0;
while(1){
pwm++; if(pwm>100) pwm=0;
OCR0A=pwm*255/100; // PWM pour le port 5 (ramenée à 255)
OCR0B=(100-pwm)*255/100; // PWM pour le port 6 (ramenée à 255)
_delay_ms(10);
}
return 0;
}
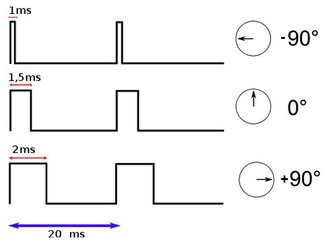
#include <Servo.h>
const int SERVO=3;
Servo myservo; // Objet servo
void setup(){
myservo.attach(SERVO); // Définit la broche du servo-moteur
}
void loop(){
for(pos=0;pos<=180;pos += 1){
myservo.write(pos); // Impose la position (en degrés) au servo
delay(15);
}
for(pos=180;pos>=0;pos -= 1){
myservo.write(pos);
delay(15);
}
}
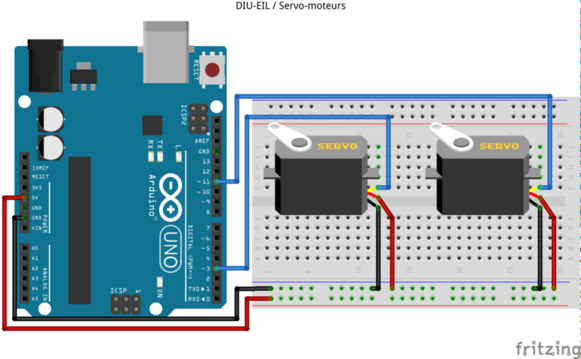
#include <avr/io.h>
#include <util/delay.h>
void servos_init(void){
DDRD |= 0x08; // La broche 3 du port D est controlée par le minuteur 2
DDRB |= 0x08; // La broche 3 du port B est controlée par le minuteur 2
TCCR2A=(1<<COM2A1)|(1<<COM2B1); // COM2A et COM2B à 10 pour signaux normaux
TCCR2A |= (1<<WGM21) | (1<<WGM20); // WGM2 à 011 pour mode "fast PWM"
TCCR2B = (1<<CS21) | (1<<CS22); // CS2 à 110 pour un pré-diviseur de 256
// Une unité de OCR2A et OCR2B représente donc 256/16000000*1000*1000=16 us
// Pour un plateau de 1ms il faut alors 62 unités
// Pour un plateau de 2ms il faut alors 125 unités
}
int main(void){
int a;
servos_init();
for(a=0;a<180;a++){ OCR2A=62+a*63/180; _delay_ms(10); }
for(a=180;a>0;a--){ OCR2A=62+a*63/180; _delay_ms(10); }
}
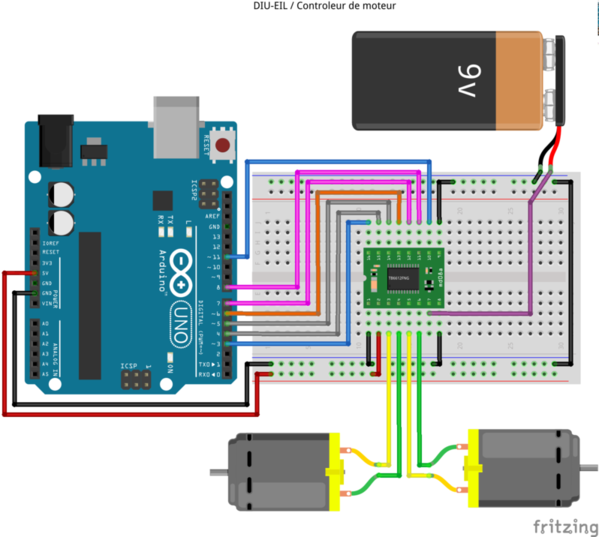
const int STANDBY=6;
const int PWMA=3;
const int AIN1=5;
const int AIN2=4;
const int PWMB=11;
const int BIN1=7;
const int BIN2=8;
const int broches[]={STANDBY,PWMA,AIN1,AIN2,PWMB,BIN1,BIN2,-1};
void setup(void){
int i=0; while(broches[i]>0) pinMode(broches[i++],OUTPUT);
digitalWrite(STANDBY,HIGH); // Activation du contrôleur
digitalWrite(AIN1,HIGH); // Les moteurs dans le même sens
digitalWrite(AIN2,LOW);
digitalWrite(BIN1,HIGH);
digitalWrite(BIN2,LOW);
analogWrite(PWMA,128); // Vitesse modérée
analogWrite(PWMB,128);
}
void loop(void){ }
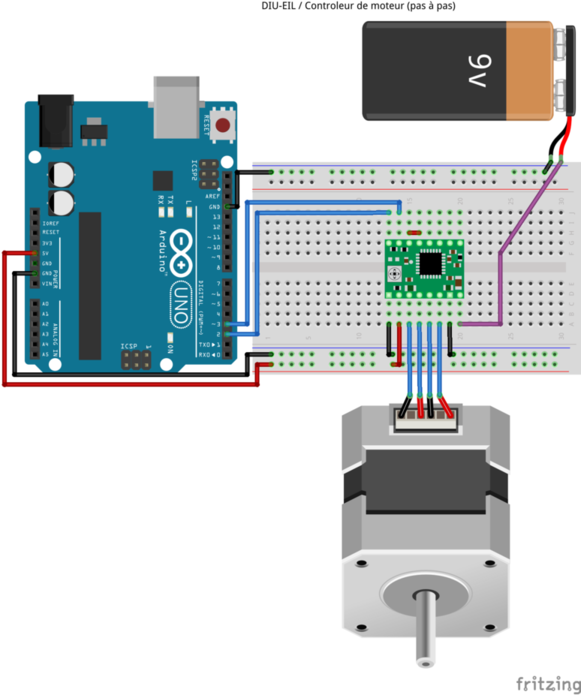
const int DIR=2;
const int STEP=3;
const int CYCLE=200;
void setup(void){
pinMode(DIR,OUTPUT);
pinMode(STEP,OUTPUT);
}
void loop(void){
digitalWrite(DIR,HIGH);
for(int pas=0;pas<CYCLE;pas++){
digitalWrite(STEP,HIGH);
delayMicroseconds(2000);
digitalWrite(STEP,LOW);
delayMicroseconds(2000);
}
delay(1000);
}
| Classe | Description | Exemple |
| 00h | Inconnu | Spécifique |
| 01h | Audio | Carte son |
| 02h | Communications | Carte réseau |
| 03h | Human interface device (HID) | Clavier |
| 05h | Physical Interface Device (PID) | Equipement à retour de force |
| 06h | Image | Webcam |
| 07h | Printer | Imprimante |
| 08h | Mass storage | Clef USB |
| 09h | USB hub | Répéteur USB |
| 0Bh | Smart Card | Lecteur de carte |
| 0Dh | Content security | Lecteur d’empreinte digitale |
| 0Eh | Video | Webcam |
| 0Fh | Personal Healthcare | Tensiomètre |
| E0h | Wireless Controller | Adaptateur Bluetooth |

# lsusb Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 002: ID 8087:0020 Intel Corp. Integrated Rate Matching Hub Bus 002 Device 002: ID 8087:0020 Intel Corp. Integrated Rate Matching Hub Bus 001 Device 003: ID 13d3:5130 IMC Networks Bus 001 Device 004: ID 058f:6366 Alcor Micro Corp. Multi Flash Reader Bus 002 Device 003: ID 05fe:1958 Chic Technology Corp. Bus 002 Device 004: ID 13fe:1e00 Kingston Technology Company Inc.
ehci_hcd: USB 2.0 'Enhanced' Host Controller (EHCI) Driver ... ehci_hcd 0000:00:1a.0: new USB bus registered, assigned bus number 1 ... usb usb1: New USB device found, idVendor=1d6b, idProduct=0002 ... hub 1-0:1.0: USB hub found hub 1-0:1.0: 2 ports detected ... ehci_hcd 0000:00:1d.0: new USB bus registered, assigned bus number 2 ... hub 2-0:1.0: USB hub found hub 2-0:1.0: 2 ports detected ... hub 1-1:1.0: USB hub found hub 1-1:1.0: 6 ports detected ... hub 2-1:1.0: USB hub found hub 2-1:1.0: 8 ports detected
usb 1-1.2: new high speed USB device number 3 using ehci_hcd usb 1-1.2: New USB device found, idVendor=13d3, idProduct=5130 usb 1-1.2: New USB device strings: Mfr=2, Product=1, SerialNumber=0 usb 1-1.2: Product: USB 2.0 Camera
# lsusb -v -s 1:3 Bus 001 Device 003: ID 13d3:5130 IMC Networks Device Descriptor: bLength 18 bDescriptorType 1 bcdUSB 2.00 bDeviceClass 239 Miscellaneous Device bDeviceSubClass 2 ? bDeviceProtocol 1 Interface Association bMaxPacketSize0 64 idVendor 0x13d3 IMC Networks idProduct 0x5130 bcdDevice 12.11 iManufacturer 2 Sonix Technology Co., Ltd. iProduct 1 USB 2.0 Camera iSerial 0 bNumConfigurations 1 ... # ls -d /sys/bus/usb/devices/1-1.2* /sys/bus/usb/devices/1-1.2 /sys/bus/usb/devices/1-1.2:1.1 /sys/bus/usb/devices/1-1.2:1.0
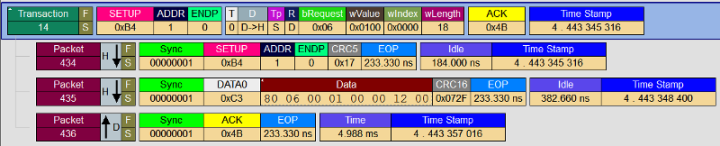
| Type (8 bits) IN|OUT | Adresse (7 bits) | Point d’accès (4 bits) | Somme de contrôle (5 bits) |
| Type (8 bits) DATAx | Données (8 à 1024 octets) | Somme de contrôle (16 bits) |
| Type (8 bits) ACK|NAK|STALL |
libusb_context *context;
int status=libusb_init(&context);
if(status!=0) {perror("libusb_init"); exit(-1);}
/* ... some code ... */
libusb_exit(context);
libusb_device **list;
ssize_t count=libusb_get_device_list(context,&list);
if(count<0) {perror("libusb_get_device_list"); exit(-1);}
ssize_t i=0;
for(i=0;i<count;i++){
libusb_device *device=list[i];
struct libusb_device_descriptor desc;
int status=libusb_get_device_descriptor(device,&desc);
if(status!=0) continue;
uint8_t bus=libusb_get_bus_number(device);
uint8_t address=libusb_get_device_address(device);
printf("Device Found @ (Bus:Address) %d:%d\n",bus,address);
printf("Vendor ID 0x0%x\n",desc.idVendor);
printf("Product ID 0x0%x\n",desc.idProduct);
}
libusb_free_device_list(list,1);
int status;
struct libusb_config_descriptor *configdesc;
status=libusb_get_active_config_descriptor(device,&configdesc);
if(status!=0){ perror("libusb_get_active_config_descriptor"); exit(-1); }
libusb_device_handle *handle;
int status=libusb_open(device,&handle);
if(status!=0){ perror("libusb_open"); exit(-1); }
/* ... some ... code */
libusb_close(handle);
int status;
int indice=0; /* e.g. première configuration */
struct libusb_config_descriptor *configdesc;
status=libusb_get_config_descriptor(device,indice,&configdesc);
if(status!=0){ perror("libusb_get_config_descriptor"); exit(-1); }
int configuration=configdesc->bConfigurationValue;
status=libusb_set_configuration(handle,configdesc->bConfigurationValue);
if(status!=0){ perror("libusb_set_configuration"); exit(-1); }
int indint=0 /* e.g. première interface */
int indalt=0 /* e.g. première alternative */
int interface=configdesc->interface[indint].altsetting[indalt].bInterfaceNumber;
int status=libusb_claim_interface(handle,interface);
if(status!=0){ perror("libusb_claim_interface"); exit(-1); }
/* ... some code ... */
status=libusb_release_interface(handle,interface);
if(status!=0){ perror("libusb_release_interface"); exit(-1); }
if(libusb_kernel_driver_active(handle,interface)){
int status=libusb_detach_kernel_driver(handle,interface);
if(status!=0){ perror("libusb_detach_kernel_driver"); exit(-1); }
}
int typ=LIBUSB_REQUEST_TYPE_xxx; /* see libusb.h */ int req=LIBUSB_REQUEST_yyy ; /* see libusb.h */ int val=...; /* parameter for req */ int ind=...; /* parameter for req */ char data[MAX_DATA]; /* data to send or to receive */ int size=...; /* size to send or maximum size to receive */ int timeout=...; /* timeout in ms */ int nb_bytes=libusb_control_transfer(handle,typ,req,val,ind,data,size,timeout);
int endpoint_out=...; /* ID of endpoint (bit 8 is 0) */
int endpoint_in=...; /* ID of endpoint (bit 8 is 1) */
char data[MAX_DATA]; /* data to send or to receive */
int size=...; /* size to send or maximum size to receive */
int timeout=...; /* timeout in ms */
/* OUT interrupt, from host to device */
int bytes_out;
int status=libusb_interrupt_transfer(handle,endpoint_out,data,size,&bytes_out,timeout);
if(status!=0){ perror("libusb_interrupt_transfer"); exit(-1); }
/* IN interrupt, host polling device */
int bytes_in;
int status=libusb_interrupt_transfer(handle,endpoint_in,data,size,&bytes_in,timeout);
if(status!=0){ perror("libusb_interrupt_transfer"); exit(-1); }
int endpoint_out=...; /* ID of endpoint (bit 8 is 0) */
int endpoint_in=...; /* ID of endpoint (bit 8 is 1) */
char data[MAX_DATA]; /* data to send or to receive */
int size=...; /* size to send or maximum size to receive */
int timeout=...; /* timeout in ms */
/* OUT bulk transfer */
int bytes_out;
int status=libusb_bulk_transfer(handle,endpoint_out,data,size,&bytes_out,timeout);
if(status!=0){ perror("libusb_bulk_transfer"); exit(-1); }
/* IN bulk transfer */
int bytes_in;
int status=libusb_bulk_transfer(handle,endpoint_in,data,size,&bytes_in,timeout);
if(status!=0){ perror("libusb_bulk_transfer"); exit(-1); }
Endpoint_ConfigureEndpoint(<EPADDR>, <EP_TYPE>, <EPSIZE>, 1);
/* Select the IN Endpoint */
Endpoint_SelectEndpoint(IN_EPADDR);
/* Check if Endpoint Ready for Read/Write */
if(Endpoint_IsReadWriteAllowed()){
/* Write Keyboard Report Data */
Endpoint_Write_xxx(...);
/* Finalize the stream transfer to send the last packet */
Endpoint_ClearIN();
}
/* Select the OUT Endpoint */
Endpoint_SelectEndpoint(OUT_EPADDR);
/* Check if Endpoint contains a packet */
if(Endpoint_IsOUTReceived()){
/* Check to see if the packet contains data */
if(Endpoint_IsReadWriteAllowed()){
/* Read from the host */
... Endpoint_Read_yyy(...);
/* Process the data from the host */
...
}
/* Handshake the OUT Endpoint - clear endpoint and ready for next report */
Endpoint_ClearOUT();
}
#include <avr/io.h> // for the input/output register
#include <avr/interrupt.h>
#define PRESCALER 256
#define NB_TICK 12500
#define CTC1 WGM12 // Better name
int led_bit=0x01;
void init_ports(void){
DDRB |= led_bit;
PORTB |= 0x00;
}
void init_timer(){
TCCR1A = 0; // No output pin connected, no PWM mode enabled
TCCR1B = 1<<CTC1; // No input pin used, clear timer counter on compare match
#if (PRESCALER==8)
TCCR1B |= (1<<CS11);
#endif
#if (PRESCALER==64)
TCCR1B |= (1<<CS11 | 11<<CS10);
#endif
#if (PRESCALER==256)
TCCR1B |= (1<<CS12);
#endif
#if (PRESCALER==1024)
TCCR1B |= (1<<CS12 | 1<<CS10);
#endif
OCR1A = NB_TICK;
TCNT1 = 0;
TIMSK1 = (1<<OCIE1A); // No overflow mode enabled, no input interrupt, output compare interrupt
}
ISR(TIMER1_COMPA_vect){
PORTB ^= led_bit;
}
int main(void){
init_ports();
init_timer();
sei();
return 0;
}
$ avr-gcc -E -I. -DF_CPU=16000000 -mmcu=atmega328p -Wp,-P -Os timer.c -o timer-cpp.c
$ cat timer-cpp.c
...
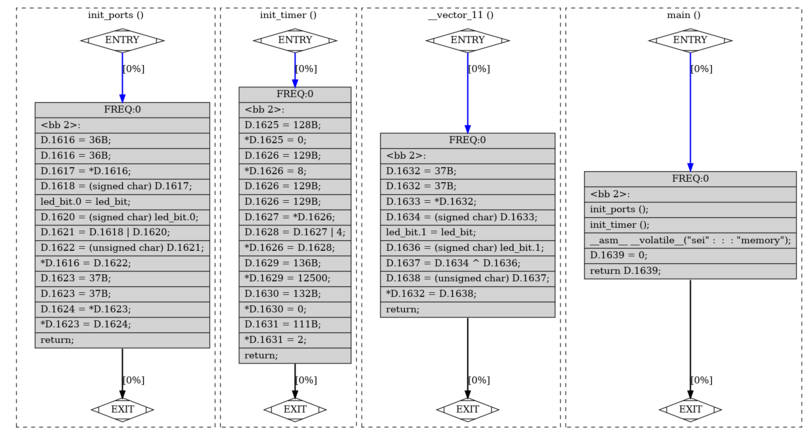
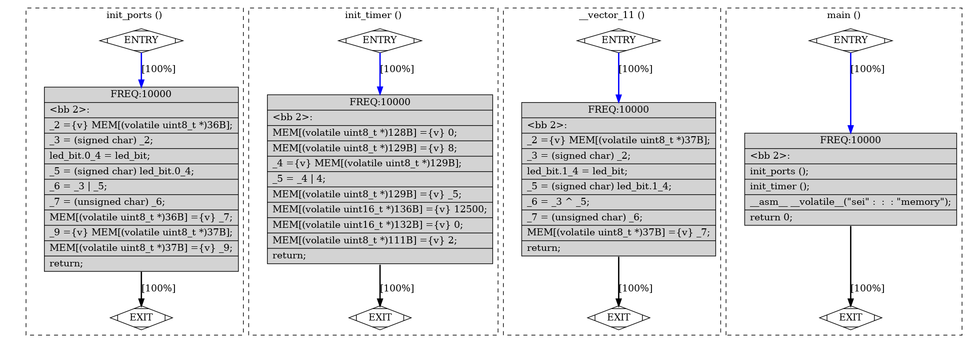
int led_bit=0x01;
void init_ports(void){
(*(volatile uint8_t *)((0x04) + 0x20)) |= led_bit;
(*(volatile uint8_t *)((0x05) + 0x20)) |= 0x00;
}
void init_timer(){
(*(volatile uint8_t *)(0x80)) = 0;
(*(volatile uint8_t *)(0x81)) = 1<<3;
(*(volatile uint8_t *)(0x81)) |= (1<<2);
(*(volatile uint16_t *)(0x88)) = 12500;
(*(volatile uint16_t *)(0x84)) = 0;
(*(volatile uint8_t *)(0x6F)) = (1<<1);
}
void __vector_11 (void) __attribute__ ((signal,used, externally_visible)) ; void __vector_11 (void){
(*(volatile uint8_t *)((0x05) + 0x20)) ^= led_bit;
}
int main(void){
init_ports();
init_timer();
__asm__ __volatile__ ("sei" ::: "memory");
return 0;
}
$ avr-gcc -Wall --dump-tree-all-graph -I. -DF_CPU=16000000 -Os -mmcu=atmega328p -c -o timer.o timer.c
...
;; Function init_ports
(note 1 0 3 NOTE_INSN_DELETED)
(note 3 1 20 [bb 2] NOTE_INSN_BASIC_BLOCK)
(note 20 3 2 NOTE_INSN_PROLOGUE_END)
(note 2 20 6 NOTE_INSN_FUNCTION_BEG)
(insn 6 2 7 (set (reg:QI 25 r25 [orig:42 D.1651 ] [42])
(mem/v:QI (const_int 36 [0x24]) [0 MEM[(volatile uint8_t *)36B]+0 S1 A8])) timer.c:13 71 {movqi_insn}
(nil))
(note 7 6 8 NOTE_INSN_DELETED)
(insn 8 7 9 (set (reg:QI 24 r24 [orig:51 led_bit ] [51])
(mem/c:QI (symbol_ref:HI ("led_bit") [flags 0x2] <var_decl 0x7f6d24cf8cf0 led_bit>) [1 led_bit+0 S1 A8])) timer.c:13 71 {movqi_insn}
(nil))
(insn 9 8 11 (set (reg:QI 24 r24 [orig:47 D.1651 ] [47])
(ior:QI (reg:QI 24 r24 [orig:51 led_bit ] [51])
(reg:QI 25 r25 [orig:42 D.1651 ] [42]))) timer.c:13 266 {iorqi3}
(expr_list:REG_DEAD (reg:QI 25 r25 [orig:42 D.1651 ] [42])
(nil)))
(insn 11 9 13 (set (mem/v:QI (const_int 36 [0x24]) [0 MEM[(volatile uint8_t *)36B]+0 S1 A8])
(reg:QI 24 r24 [orig:47 D.1651 ] [47])) timer.c:13 71 {movqi_insn}
(expr_list:REG_DEAD (reg:QI 24 r24 [orig:47 D.1651 ] [47])
(nil)))
(insn 13 11 15 (set (reg:QI 24 r24 [orig:48 D.1651 ] [48])
(mem/v:QI (const_int 37 [0x25]) [0 MEM[(volatile uint8_t *)37B]+0 S1 A8])) timer.c:14 71 {movqi_insn}
(nil))
(insn 15 13 22 (set (mem/v:QI (const_int 37 [0x25]) [0 MEM[(volatile uint8_t *)37B]+0 S1 A8])
(reg:QI 24 r24 [orig:48 D.1651 ] [48])) timer.c:14 71 {movqi_insn}
(expr_list:REG_DEAD (reg:QI 24 r24 [orig:48 D.1651 ] [48])
(nil)))
(jump_insn 22 15 21 (return) timer.c:14 453 {return}
(nil)
-> return)
(barrier 21 22 18)
(note 18 21 0 NOTE_INSN_DELETED)
...
$ avr-gcc -Wall -I. -DF_CPU=16000000 -Os -mmcu=atmega328p -S -o timer.s timer.c
$ cat timer.s
__SP_H__ = 0x3e
__SP_L__ = 0x3d
__SREG__ = 0x3f
__tmp_reg__ = 0
__zero_reg__ = 1
.text
.global init_ports
.type init_ports, @function
init_ports:
.L__stack_usage = 0
in r25,0x4
lds r24,led_bit
or r24,r25
out 0x4,r24
in r24,0x5
out 0x5,r24
ret
.size init_ports, .-init_ports
.global init_timer
.type init_timer, @function
init_timer:
.L__stack_usage = 0
sts 128,__zero_reg__
ldi r30,lo8(-127)
ldi r31,0
ldi r24,lo8(8)
st Z,r24
ld r24,Z
ori r24,lo8(4)
st Z,r24
ldi r24,lo8(-44)
ldi r25,lo8(48)
sts 136+1,r25
sts 136,r24
sts 132+1,__zero_reg__
sts 132,__zero_reg__
ldi r24,lo8(2)
sts 111,r24
ret
.size init_timer, .-init_timer
.global __vector_11
.type __vector_11, @function
__vector_11:
push r1
push r0
in r0,__SREG__
push r0
clr __zero_reg__
push r24
push r25
.L__stack_usage = 5
in r25,0x5
lds r24,led_bit
eor r24,r25
out 0x5,r24
pop r25
pop r24
pop r0
out __SREG__,r0
pop r0
pop r1
reti
.size __vector_11, .-__vector_11
.section .text.startup,"ax",@progbits
.global main
.type main, @function
main:
.L__stack_usage = 0
call init_ports
call init_timer
sei
ldi r24,0
ldi r25,0
ret
.size main, .-main
.global led_bit
.data
.type led_bit, @object
.size led_bit, 2
led_bit:
.word 1
.ident "GCC: (GNU) 5.4.0"
.global __do_copy_data
$ avr-readelf -h timer.elf En-tête ELF: Magique: 7f 45 4c 46 01 01 01 00 00 00 00 00 00 00 00 00 Classe: ELF32 Données: complément à 2, poids faible d'abord (little endian) Version: 1 (current) OS/ABI: UNIX - System V Version ABI: 0 Type: EXEC (fichier exécutable) Machine: Atmel AVR 8-bit microcontroller Version: 0x1 Adresse du point d'entrée: 0x0 Début des en-têtes de programme : 52 (octets dans le fichier) Début des en-têtes de section : 6256 (octets dans le fichier) Fanions: 0x5, avr:5 Size of this header: 52 (bytes) Size of program headers: 32 (bytes) Number of program headers: 2 Size of section headers: 40 (bytes) Number of section headers: 12 Section header string table index: 9
$ avr-readelf -S timer.elf There are 12 section headers, starting at offset 0x1870: En-têtes de section : [Nr] Nom Type Adr Décala.Taille ES Fan LN Inf Al [ 0] NULL 00000000 000000 000000 00 0 0 0 [ 1] .data PROGBITS 00800100 000182 000002 00 WA 0 0 1 [ 2] .text PROGBITS 00000000 000074 00010e 00 AX 0 0 2 [ 3] .comment PROGBITS 00000000 000184 000011 01 MS 0 0 1 [ 4] .note.gnu.avr.dev NOTE 00000000 000198 000040 00 0 0 4 [ 5] .debug_info PROGBITS 00000000 0001d8 0005f4 00 0 0 1 [ 6] .debug_abbrev PROGBITS 00000000 0007cc 0005a2 00 0 0 1 [ 7] .debug_line PROGBITS 00000000 000d6e 00001a 00 0 0 1 [ 8] .debug_str PROGBITS 00000000 000d88 000208 00 0 0 1 [ 9] .shstrtab STRTAB 00000000 0017f3 00007a 00 0 0 1 [10] .symtab SYMTAB 00000000 000f90 0004e0 10 11 17 4 [11] .strtab STRTAB 00000000 001470 000383 00 0 0 1 Key to Flags: W (write), A (alloc), X (execute), M (merge), S (strings) I (info), L (link order), G (group), T (TLS), E (exclude), x (unknown) O (extra OS processing required) o (OS specific), p (processor specific)
$ avr-readelf -l timer.elf Type de fichier ELF est EXEC (fichier exécutable) Entry point 0x0 There are 2 program headers, starting at offset 52 En-têtes de programme : Type Décalage Adr. vir. Adr.phys. T.Fich. T.Mém. Fan Alignement LOAD 0x000074 0x00000000 0x00000000 0x0010e 0x0010e R E 0x2 LOAD 0x000182 0x00800100 0x0000010e 0x00002 0x00002 RW 0x1 Correspondance section/segment : Sections de segment... 00 .text 01 .data
$ avr-objdump -d timer.elf
Déassemblage de la section .text :
00000000 <__vectors>:
0: 0c 94 34 00 jmp 0x68 ; 0x68 <__ctors_end>
4: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
8: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
c: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
10: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
14: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
18: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
1c: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
20: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
24: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
28: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
2c: 0c 94 6a 00 jmp 0xd4 ; 0xd4 <__vector_11>
30: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
34: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
38: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
3c: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
40: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
44: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
48: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
4c: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
50: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
54: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
58: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
5c: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
60: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
64: 0c 94 49 00 jmp 0x92 ; 0x92 <__bad_interrupt>
00000068 <__ctors_end>:
68: 11 24 eor r1, r1
6a: 1f be out 0x3f, r1 ; 63
6c: cf ef ldi r28, 0xFF ; 255
6e: d8 e0 ldi r29, 0x08 ; 8
70: de bf out 0x3e, r29 ; 62
72: cd bf out 0x3d, r28 ; 61
00000074 <__do_copy_data>:
74: 11 e0 ldi r17, 0x01 ; 1
76: a0 e0 ldi r26, 0x00 ; 0
78: b1 e0 ldi r27, 0x01 ; 1
7a: ee e0 ldi r30, 0x0E ; 14
7c: f1 e0 ldi r31, 0x01 ; 1
7e: 02 c0 rjmp .+4 ; 0x84 <__do_copy_data+0x10>
80: 05 90 lpm r0, Z+
82: 0d 92 st X+, r0
84: a2 30 cpi r26, 0x02 ; 2
86: b1 07 cpc r27, r17
88: d9 f7 brne .-10 ; 0x80 <__do_copy_data+0xc>
8a: 0e 94 7d 00 call 0xfa ; 0xfa <main>
8e: 0c 94 85 00 jmp 0x10a ; 0x10a <_exit>
00000092 <__bad_interrupt>:
92: 0c 94 00 00 jmp 0 ; 0x0 <__vectors>
00000096 <init_ports>:
96: 94 b1 in r25, 0x04 ; 4
98: 80 91 00 01 lds r24, 0x0100 ; 0x800100 <__DATA_REGION_ORIGIN__>
9c: 89 2b or r24, r25
9e: 84 b9 out 0x04, r24 ; 4
a0: 85 b1 in r24, 0x05 ; 5
a2: 85 b9 out 0x05, r24 ; 5
a4: 08 95 ret
000000a6 <init_timer>:
a6: 10 92 80 00 sts 0x0080, r1 ; 0x800080 <__TEXT_REGION_LENGTH__+0x7f8080>
aa: e1 e8 ldi r30, 0x81 ; 129
ac: f0 e0 ldi r31, 0x00 ; 0
ae: 88 e0 ldi r24, 0x08 ; 8
b0: 80 83 st Z, r24
b2: 80 81 ld r24, Z
b4: 84 60 ori r24, 0x04 ; 4
b6: 80 83 st Z, r24
b8: 84 ed ldi r24, 0xD4 ; 212
ba: 90 e3 ldi r25, 0x30 ; 48
bc: 90 93 89 00 sts 0x0089, r25 ; 0x800089 <__TEXT_REGION_LENGTH__+0x7f8089>
c0: 80 93 88 00 sts 0x0088, r24 ; 0x800088 <__TEXT_REGION_LENGTH__+0x7f8088>
c4: 10 92 85 00 sts 0x0085, r1 ; 0x800085 <__TEXT_REGION_LENGTH__+0x7f8085>
c8: 10 92 84 00 sts 0x0084, r1 ; 0x800084 <__TEXT_REGION_LENGTH__+0x7f8084>
cc: 82 e0 ldi r24, 0x02 ; 2
ce: 80 93 6f 00 sts 0x006F, r24 ; 0x80006f <__TEXT_REGION_LENGTH__+0x7f806f>
d2: 08 95 ret
000000d4 <__vector_11>:
d4: 1f 92 push r1
d6: 0f 92 push r0
d8: 0f b6 in r0, 0x3f ; 63
da: 0f 92 push r0
dc: 11 24 eor r1, r1
de: 8f 93 push r24
e0: 9f 93 push r25
e2: 95 b1 in r25, 0x05 ; 5
e4: 80 91 00 01 lds r24, 0x0100 ; 0x800100 <__DATA_REGION_ORIGIN__>
e8: 89 27 eor r24, r25
ea: 85 b9 out 0x05, r24 ; 5
ec: 9f 91 pop r25
ee: 8f 91 pop r24
f0: 0f 90 pop r0
f2: 0f be out 0x3f, r0 ; 63
f4: 0f 90 pop r0
f6: 1f 90 pop r1
f8: 18 95 reti
000000fa <main>:
fa: 0e 94 4b 00 call 0x96 ; 0x96 <init_ports>
fe: 0e 94 53 00 call 0xa6 ; 0xa6 <init_timer>
102: 78 94 sei
104: 80 e0 ldi r24, 0x00 ; 0
106: 90 e0 ldi r25, 0x00 ; 0
108: 08 95 ret
0000010a <_exit>:
10a: f8 94 cli
0000010c <__stop_program>:
10c: ff cf rjmp .-2 ; 0x10c <__stop_program>
$ avr-gcc -g -mmcu=atmega328p -lm -Wl,--gc-sections -o timer.elf timer.o
$ avr-ld -mavr5 timer.o /usr/lib/avr/lib/avr5/crtatmega328p.o -o timer.elf \
-L /usr/lib/avr/lib -L /usr/lib/avr/lib/avr5 -L /usr/lib/gcc/avr/5.4.0 \
--start-group -lgcc -lm -lc -latmega328p --end-group
// Blink code for Adafruit Playground Express (APE)
// APE chip is an samd21g18a
// APE LED is on PA17
#include <stdint.h>
// Some constants about PORT A
#define PORT_BASE 0x41004400
#define PORT_OFFSET(o) (*(volatile uint32_t *)(PORT_BASE+o))
#define PORTA_DIRSET PORT_OFFSET(0x08)
#define PORTA_OUTCLR PORT_OFFSET(0x14)
#define PORTA_OUTSET PORT_OFFSET(0x18)
// Some constants for the LED
#define LED_PIN 17
// Some constants for sleep function
#define STEPS_PER_CHUNK 10000
void my_sleep(unsigned int chunks){
unsigned int i,s;
for(s=0;s<chunks;s++){
for(i=0;i<STEPS_PER_CHUNK;i++){
// skip CPU cycle or any other statement(s) for making loop
// untouched by C compiler code optimizations
asm volatile ("nop");
}
}
}
// Initialisation of PORT A
void init_ports(void){
PORTA_DIRSET=(1<<LED_PIN); // no need for read/modify/write
PORTA_OUTCLR=(1<<LED_PIN); // idem
}
// Main function
int main(void) {
// Initialize ports
init_ports();
// Forever loop
while(1){
// Fire up LED
PORTA_OUTSET=(1<<LED_PIN); // no need for read/modify/write
// Wait for some time
my_sleep(10);
// Shut LED
PORTA_OUTCLR=(1<<LED_PIN); // no need for read/modify/write
// Wait again for some time
my_sleep(10);
}
return 0;
}
MCU = cortex-m0plus
MFREQ = 48000000
CC = arm-none-eabi-gcc
LD = arm-none-eabi-gcc
FLAGS = -mcpu=$(MCU) -mthumb
CFLAGS += -Wall --std=gnu99 -Os
CFLAGS += -fno-diagnostics-show-caret
CFLAGS += -fdata-sections -ffunction-sections
CFLAGS += -funsigned-char -funsigned-bitfields
CFLAGS += $(FLAGS) -DF_CPU=$(MFREQ) -I include
CFLAGS += -MD -MP
CFLAGS += -D__SAMD21G18A__ -DDONT_USE_CMSIS_INIT
LDFLAGS += $(FLAGS)
LDFLAGS += -Wl,--gc-sections
LDFLAGS += -Wl,--script=linker/samd21.ld
TARGET = blink
SOURCES = $(wildcard *.c)
OBJECTS = $(SOURCES:.c=.o)
all: $(TARGET)
clean:
rm -f *.o *.d $(TARGET).hex $(TARGET)
$(TARGET): $(OBJECTS)
MEMORY
{
flash (rx) : ORIGIN = 0x00000000, LENGTH = 0x40000 /* 256k */
ram (rwx) : ORIGIN = 0x20000000, LENGTH = 0x8000 /* 32k */
}
__top_flash = ORIGIN(flash) + LENGTH(flash);
__top_ram = ORIGIN(ram) + LENGTH(ram);
ENTRY(irq_handler_reset)
SECTIONS
{
.text : ALIGN(4)
{
FILL(0xff)
KEEP(*(.vectors))
*(.text)
*(.rodata)
. = ALIGN(4);
} > flash
. = ALIGN(4);
_etext = .;
.data : ALIGN(4)
{
FILL(0xff)
_data = .;
*(.data)
. = ALIGN(4);
_edata = .;
} > ram AT > flash
.bss : ALIGN(4)
{
_bss = .;
*(.bss)
. = ALIGN(4);
_ebss = .;
PROVIDE(_end = .);
} > ram
PROVIDE(_stack_top = __top_ram - 0);
}
#define SCB_BASE 0xE000ED00
#define SCB_OFFSET(o) (*(volatile uint32_t *)(SCB_BASE+o))
#define SCB_VTOR SCB_OFFSET(0x08)
...
void (* const vectors[])(void) =
{
&_stack_top, // 0 - Initial Stack Pointer Value
// Cortex-M0+ handlers
irq_handler_reset, // 1 - Reset
irq_handler_nmi, // 2 - NMI
irq_handler_hard_fault, // 3 - Hard Fault
...
};
void irq_handler_reset(void)
{
unsigned int *src, *dst;
src = &_etext;
dst = &_data;
while (dst < &_edata)
*dst++ = *src++;
dst = &_bss;
while (dst < &_ebss)
*dst++ = 0;
SCB_VTOR = (uint32_t)vectors;
main();
while (1);
}
...
$ lsusb Bus 003 Device 039: ID 0483:374b STMicroelectronics ST-LINK/V2.1
$ cat st_nucleo_samd21.cfg
source [find interface/stlink.cfg]
transport select hla_swd
set CHIPNAME at91samd21
set CPUTAPID 0x0bc11477
source [find target/at91samdXX.cfg]
$ openocd -f st_nucleo_samd21.cfg \
-c "init" \
-c "at91samd bootloader 0" \
-c "program blink verify" \
-c "reset" -c "exit"
Open On-Chip Debugger 0.12.0
Info : clock speed 400 kHz
Info : STLINK V2J33M25 (API v2) VID:PID 0483:374B
Info : [at91samd21.cpu] Cortex-M0+ r0p1 processor detected
Info : [at91samd21.cpu] target has 4 breakpoints, 2 watchpoints
[at91samd21.cpu] halted due to debug-request, current mode: Thread
xPSR: 0x21000000 pc: 0x0000010c msp: 0x20008000
** Programming Started **
Info : SAMD MCU: SAMD21G18A (256KB Flash, 32KB RAM)
** Programming Finished **
** Verify Started **
** Verified OK **
CLKSEL0 = 0b00010101; // sélection de l'horloge externe CLKSEL1 = 0b00001111; // minimum de 8Mhz CLKPR = 0b10000000; // modification du diviseur d'horloge (CLKPCE=1) CLKPR = 0; // 0 pour pas de diviseur (diviseur de 1)
$ avrdude -c avrisp -p atmega8u2 -P /dev/ttyACM0 -b 19200 -t avrdude> erase avrdude> quit $
$ avrdude -c avrisp -p atmega8u2 -P /dev/ttyACM0 -b 19200 -U lfuse:w:0xde:m -U hfuse:w:0xd9:m -U efuse:w:0xf4:m
$ avrdude -c avrisp -p atmega8u2 -P /dev/ttyACM0 -b 19200 -U flash:w:at90usb82-bl-usb-1_0_5.hex
Ce document a été traduit de LATEX par HEVEA
{kind=link}